Курсовая работа: Система автоматичного регулювання асинхронного електродвигуна з фазним ротором
Попередньо замінимо ланки, охоплені місцевим зворотним зв'язком (УОС) з коефіцієнтом передачі Kп, одною еквівалентною ланкою.
Передатна функція ланцюга охопленим місцевим зворотним зв'язком, визначається по формулі:

Підставимо в знайдене вираження чисельні значення параметрів і одержимо:
![]()
При послідовному з'єднанні ланок їхні передатні функції перемножуються, тому:
![]()
Остаточно для безінерційного регулятора одержуємо:
![]()
Залежність керуючого впливу RФ від помилки е показує, що в розглянутій системі застосований П - закон регулювання.
4. Визначення передатних функцій системи й впливах і для помилок по цих впливах
Передатна функція САР по керуючому впливу:
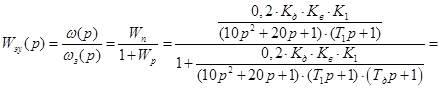

= ![]()
Передатна функція САР по впливі, що обурює:
 =
=

Передатна функція САР для помилки по керуючому впливі:
![]()

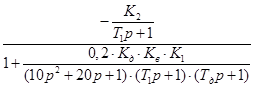
Передатна функція САР для помилки по впливі, що обурює:
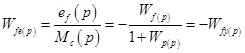
![]()
5. Аналіз стійкості системи. Визначення запасів стійкості
5.1 Аналіз стійкості за критерієм Гурвіца
Для аналізу стійкості САР частоти обертання приводного електродвигуна стенда для обкатування ДВС скористаємося кожною з отриманих у пункті 4 передатних функцій, з яких треба що характеристичне рівняння системи:
![]()
Для аналізу стійкості скористаємося безпосередньо умовами стійкості для рівняння четвертого ступеня: ![]() >0,
>0, ![]() >0,
>0, ![]() >0,
>0, ![]() >0,
>0, ![]() >0;
>0;