Курсовая работа: Система стабилизации скорости вращения двигателя постоянного тока
4.4.3 Защита тиристоров от внутренних и внешних КЗ
4.4.4 Выбор автоматических выключателей
5. Анализ и синтез линеаризованных структур
5.1 Структурная схема регулирования
5.2 Исследование системы на устойчивость
5.3 Синтез системы и расчет параметров регуляторов
5.3.1 Контур регулирования тока
5.3.2 Контур регулирования скорости
6. Расчет и построение статических характеристик
Список литературы [10 - 12]
Введение
Электрический привод представляет собой электромеханическую систему, обеспечивающую реализацию различных технологических и производственных процессов в промышленности, сельском хозяйстве, на транспорте, коммунальном хозяйстве и в быту с использованием механической энергии. Назначение электропривода состоит в обеспечении движения исполнительных органов рабочих машин и механизмов и управлении этим движением.
Научно-технический прогресс, автоматизация и комплексная механизация технологических и производственных процессов определяют постоянное совершенствование и развитие современного ЭП. В первую очередь это относится ко все более широкому внедрению автоматизированных ЭП с использованием разнообразных полупроводниковых силовых преобразователей и микропроцессорных средств управления. Характерной чертой автоматизации является быстрое развитие робототехники, внедрение гибких автоматизированных производств, автоматических линий, машин и оборудования со встроенными средствами микропроцессорной техники, многооперационных станков с числовым программным, управлением, роторных конвейерных комплексов.
Дальнейшее развитие электрификации и автоматизации технологических процессов, создание высокопроизводительных машин, механизмов и технологических комплексов во многом определяется развитием электрического привода.
К основным направлениям развития современного ЭП относятся:
разработка и выпуск комплектных регулируемых ЭП с использованием современных преобразователей и микропроцессорного, управления;
повышение эксплуатационной надежности, унификации и улучшение энергетических показателей ЭП;
расширение области применения регулируемого асинхронного ЭП и использование ЭП с новыми типами двигателей, а именно линейными, шаговыми, вентильными, вибрационными, повышенного быстродействия, магнитогидродинамическими и др.;
развитие научно-исследовательских работ по созданию математических моделей и алгоритмов технологических процессов, а также машинных средств проектирования ЭП;
подготовка инженерно-технических и научных кадров, способных проектировать, создавать и эксплуатировать современный автоматизированный электропривод.
Решение этих и ряда других проблем позволит существенно улучшить технико-экономические характеристики электропривода и создать тем самым базу для дальнейшего технического прогресса во всех отраслях промышленного производства транспорта сельского хозяйства и в быту.
1. Данные для расчета системы стабилизации скорости электропривода постоянного тока
М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с
М2 = 32 Н·м t2 = 53 с t8 = 2 с
М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1
М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1
М5 = - 55 Н·м t5 = 0,4 с D = 50/1
М6 = - 39 Н·м t6 = 50 с δ = 0,5%
2. Нагрузочная диаграмма и тахограмма электропривода
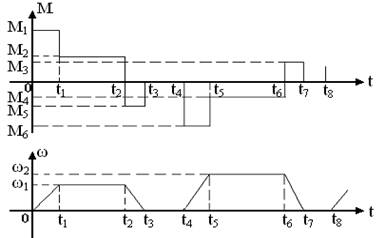
Рисунок 2.1 - Нагрузочная диаграмма и тахограмма электропривода
3. Расчет мощности и выбор электродвигателя
На основании данных нагрузочной диаграммы и тахограммы, приведенных в задании, производим расчет мощности электродвигателя по известным из курса «Теории электропривода» зависимостям: