Курсовая работа: Система управления электроприводом постоянного тока
Для того чтобы уменьшить влияние упругой связи двух массовой системы на работу электропривода и демпфирования упругих колебаний введём гибкую обратную связь по скорости (ускорению) второй массы. Таким образом на регулятор скорости будет подаваться не только задание на скорость и сигнал обратной связи по скорости первой массы, но и сигнал гибкой обратной связи по скорости второй массы. Действие этой гибкой связи можно расценивать как искусственное увеличение ![]() .
.
Структурная схема контура представлена на рис 3:
|
|
|
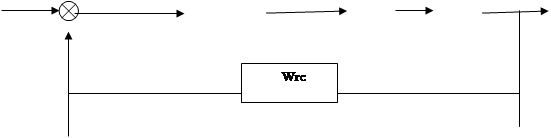
Рис 3
Передаточная функция гибкой обратной связи
Wгс = - То*Р
Для нормальной работы системы необходимо привести сигнал гибкой ОС к сигналу задания на скорость. Для этого в цепь гибкой ОС необходимо ввести коэффициент ОС по скорости первой массы.
Wгс = - То*Р*Кос
Для определения То надо задаться величиной о и подставить её в формулу:
![]()
Примем j = 5.8 Получим To = 0,235 Результаты моделирования.
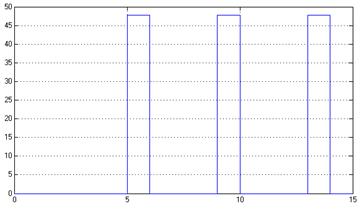
Рис.4. Момент сопротивления
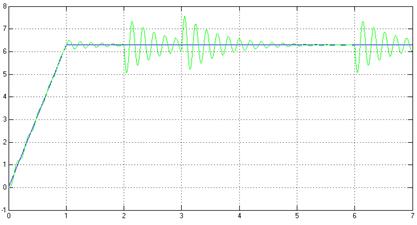
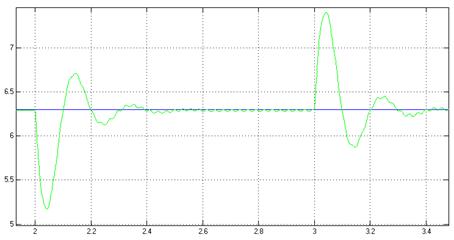
Рис.5. Скорость второй массы без гибкой обратной гибкой ОС.
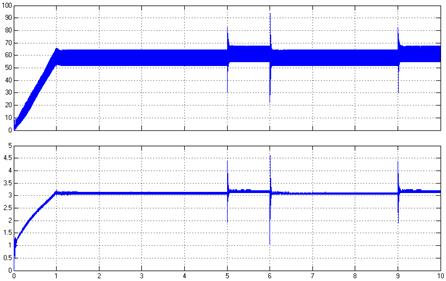
Рис.6. Напряжение с ТП и сигнал управления.
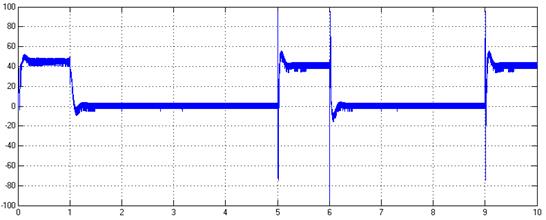
Рис.7. Зависимость тока от времени.
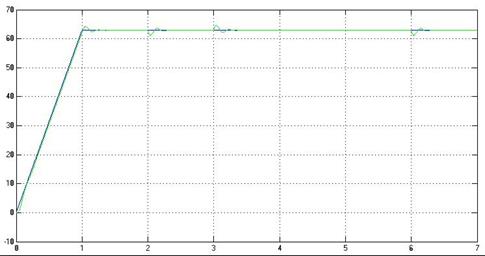
Рис.8. Скорость второй массы с гибкой ОС, задание 10в
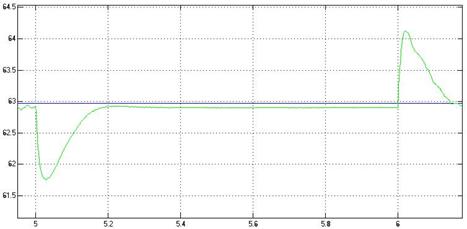
Рис.9. Скорость второй массы с гибкой ОС, задание 10в (увеличено)
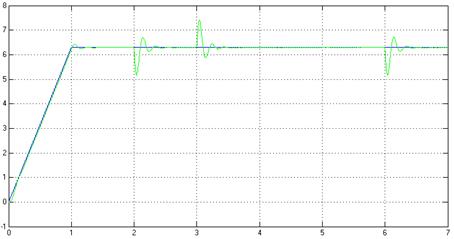
Рис.10. Скорость второй массы с гибкой ОС, задание 1в