Курсовая работа: Структурная схема и управление электроприводом
Где a0 =ej 0 =1; a=ej 2 π /3 ; a2 = ej 4 π /3 .
Аналогично определяются результирующие векторы напряжения
![]()
и потокосцепления
Используя выражения результирующих векторов, уравнения (1) можно записать в виде одного дифференциального уравнения в векторной форме. Для этого первое уравнение из (1) умножается на 2/3a0 , второе на 2/3a, третье на 2/3a2 . Суммируя полученные произведения, получим

или в векторной форме
![]() (4)
(4)
Аналогично векторное уравнение напряжений ротора:
![]() (5)
(5)
В уравнениях (4) и (5) векторы записаны соответственно в системах координат статора и ротора. Для совместного решения уравнений их необходимо привести к одной системе координат.
При исследовании переходных процессов в электродвигателях переменного тока применяют различные ортогональные системы координат, отличающиеся угловой скоростью вращения координатных осей сок, например системы, оси которых неподвижны относительно ротора, или неподвижны относительно статора, или вращаются с синхронной скоростью.
Уравнения асинхронного электродвигателя в системе координат, вращающейся с произвольной скоростью ωк , имеют вид
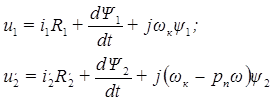 (6)
(6)
где ω — угловая скорость вращения ротора; pп — число пар полюсов.
При исследовании переходных процессов в асинхронном электродвигателе, управляемом частотой и напряжением статора, удобно использовать систему координат, вращающуюся со скоростью ωк , равной угловой скорости вращения магнитного поля ω0 ’, приведенной к числу пар полюсов, равному единице (приведенной к двухполюсному электродвигателю). Предполагается при этом справедливым равенство
![]() ,
,
где f1 — частота напряжения статора, Гц; ω1 — угловая частота напряжения статора, рад/с.
На основании уравнений (6) для рассматриваемой координатной системы можно записать
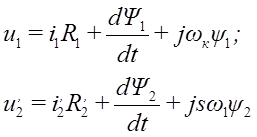 (7)
(7)
где s — скольжение электродвигателя:
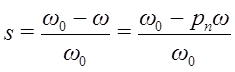
(ω0 = ω0 ’/pп — угловая скорость вращения магнитного поля, или синхронная скорость электродвигателя).
Потокосцепления связаны с токами через индуктивности
 (8)
(8)
Для определения электромагнитного момента асинхронного электродвигателя используется векторное произведение ψ1 и i1
тогда
 (9)
(9)