Курсовая работа: Устойчивость систем автоматического управления
Выполнил: студент гр. 22308
Зиннатуллин А.Ф.
Проверил: Конюхов М.И.
Елабуга 2010
Аннотация
В данной работе было представлено устойчивость систем автоматического управления. Устойчивость считается важнейшим и обязательным понятием, так как только в устойчивой системе могут быть удовлетворены другие требования к качеству.
Введение
Устойчивость АСУ характеризует способность системы возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Следовательно, только устойчивая система является работоспособной. Понятие "устойчивость" наглядно иллюстрирует рис. 1, на котором представлена физическая система шар – опорная поверхность. На рис. 1, а и б шар находится в положении равновесия. При отклонении от этого положения в любую сторону в первом случае (рис. 1,а) шар не может вернуться в исходное положение (неустойчивое равновесие), а во втором (рис. 1,б) – возвращается (устойчивое равновесие). Если опорная поверхность представляет собой горизонтальную плоскость, то шар движется по ней до тех пор, пока действует движущая сила Fд и после ее исчезновения останавливается в любой точке на плоскости (безразличное равновесие). Такая система иногда называется нейтральной (рис. 1,в).
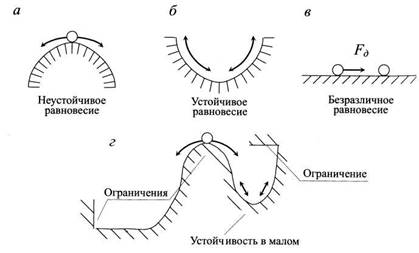
Рис. 1. Физическая система шар – опорная поверхность
Говорят, что система устойчива в малом, если констатируют лишь факт наличия области устойчивости, но не определяют каким-либо образом ее границы. Если границы устойчивости определены, т.е. границы области начальных отклонений, при которых система возвращается в состояние равновесия, известны (рис. 1,г), и выяснено, что реальные начальные отклонения принадлежат этой области, то система устойчива в большом. Когда система возвращается в состояние равновесия при любых начальных отклонениях, ее называют устойчивой в целом, т. е. в малом и большом.
Переходные процессы в АСУ.
В любой АСУ в результате воздействия возмущающих сил, с одной стороны, и восстанавливающего действия управляющего устройства, с другой, возникает переходный процесс: переход АСУ из одного состояния в другое. Рассмотрим различные типы переходного процесса.
Пусть АСУ описывается дифференциальным уравнением вида
![]() (1)
(1)
характеристическое уравнение, которого
![]()
имеет корни
![]()
Решение ДУ описывает переходной процесс y(t) характер которого определяется коэффициентом x. Возможное расположение корней характеристического уравнения на комплексной плоскости р при различных значениях x показано на рис. 2. Рассмотрим переходные процессы, соответствующие различным значениям x.
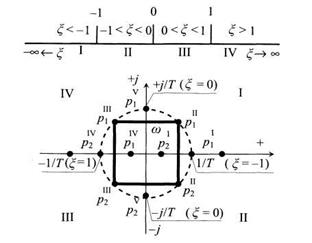
Рис. 2. Расположение корней характеристического уравнения
x<-1. Переходная функция h(t) при подаче на вход единичного ступенчатого сигнала имеет вид: ![]() , при этом корни характеристического уравнения вещественные положительные (p1,2 >0) и, следовательно,
, при этом корни характеристического уравнения вещественные положительные (p1,2 >0) и, следовательно, ![]() .В данном случае система не может восстановить равновесное состояние, значение управляемой координаты все больше отклоняется от заданного. Такой переходный процесс называется расходящимся монотонным (апериодическим) (рис. 3,а), а система неустойчивой (идет процесс накопления энергии из внешней среды).
.В данном случае система не может восстановить равновесное состояние, значение управляемой координаты все больше отклоняется от заданного. Такой переходный процесс называется расходящимся монотонным (апериодическим) (рис. 3,а), а система неустойчивой (идет процесс накопления энергии из внешней среды).
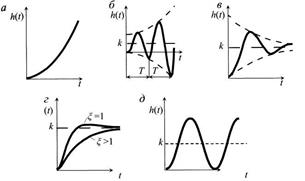
Рис. 3. Виды переходного процесса
-1<x<0. При этом ![]() ,
, ![]() а переходная функция имеет вид:
а переходная функция имеет вид:
![]()
где ![]() ,
, ![]() .
.
Характеристики системы те же, что и в предыдущем случае, но переходный процесс колебательный (рис. 3,б).
0<x<1. Переходная функция h(t) та же, что и в случае II, но при ![]() . При этом система возвращается в равновесное состояние, а значение управляемой координаты приближается к заданному. Такой переходный процесс называется сходящимся колебательным, а система устойчивой (происходит отдача энергии во внешнюю среду) (рис. 3,в).
. При этом система возвращается в равновесное состояние, а значение управляемой координаты приближается к заданному. Такой переходный процесс называется сходящимся колебательным, а система устойчивой (происходит отдача энергии во внешнюю среду) (рис. 3,в).
x>1. Переходная функция h(t) имеет тот же вид, что и в случае I, но ![]() . Характеристика системы та же, что и в III случае, но переходный процесс монотонный (апериодический) (рис. 3,в). На этом же рисунке показана переходная функция при x=1,
. Характеристика системы та же, что и в III случае, но переходный процесс монотонный (апериодический) (рис. 3,в). На этом же рисунке показана переходная функция при x=1, ![]() .
.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--