Курсовая работа: Устройство формирования управляющих сигналов
Описание устройства
Техническое задание
Исходные данные
Анализ частотных характеристик идеального дифференцирующего устройства
Проверка возможности применения для целей дифференцирования сигнала простейшей дифференцирующей rc-цепочки
Выбор необходимых параметров rc-цепочки, согласно критериям технического задания
Расчет в общем виде АЧХ и ФЧХ скорректированного дифференцирующего устройства (r-L-c цепи). Расчет параметров r-L-c цепи согласно требованиям технического задания
Вычисление АЧХ и ФЧХ r-L-c цепочки с учётом всех выбранных параметров
Общий вывод
Описание устройства
Блок-схема рассматриваемого устройства представлена на рис.1. Здесь u1 (t) - некоторый входной сигнал (сигнал управления), ДУ - дифференцирующее устройство, формирующее сигнал по производной
![]() ,
,
где т = const, ∑ - сумматор, u3 (t) - выходной сигнал, в котором соотношение составляющих u1 (t) и u2 (t)можно регулировать.
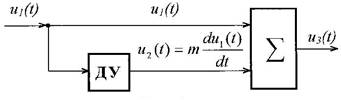
Рис.1 Блок-схема устройства формирования управляющих сигналов
Входной сигнал u1 (t) используется в качестве сигнала управления в некоторой системе автоматического регулирования. С целью достижения более высокого качества управления (например, для увеличения запаса устойчивости системы), кроме сигнала u1 (t) должен использоваться также сигнал по производной u2 (t), где m- постоянный масштабный коэффициент (как правило, т<<1).Сигнал управления и сигнал по производной суммируется на входе соответствующего суммирующего устройства.
Входной сигнал имеет вид:
u1 (t)=U(1) m ∙sin(ωt+ψ(1) )+ U(2) m ∙sin(kωt+ψ(2) )+ U( q ) m ∙sin(qωt+ψ( q ) ).
Две первые низкочастотные составляющие (1<к<<q)являются полезным сигналом управления, высокочастотная составляющая с частотой qω - помеха. Такие высокочастотные составляющие характерны, например, для сигнала, полученного в результате демодуляции после передачи его по линии связи на несущей частоте. В этом случае полезный сигнал передается как огибающая сигнала на несущей частоте. На рис.2 огибающая показана пунктиром. Она может быть выделена в результате демодуляции, а высокочастотная составляющая подавлена, однако, как правило, не до конца (рис.3). При этом уровень помехи невелик и является для полезного сигнала допустимым.
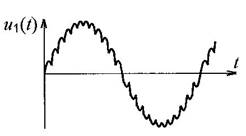 |
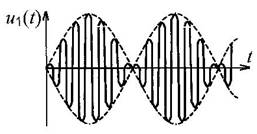
Рис.2, 3 - Сигнал управления на несущей частоте и сигнал управлении после демодуляции
Конечной целью данной курсовой работы является формирование сигнала по производной ![]() с помощью некоторого дифференцирующего устройства с приемлемым качеством дифференцирования и уровнем высокочастотной помехи.
с помощью некоторого дифференцирующего устройства с приемлемым качеством дифференцирования и уровнем высокочастотной помехи.
Техническое задание
1. Проанализировать, какими частотными характеристиками должно обладать идеальное дифференцирующее устройство, способное дифференцировать сигнал с неограниченным спектром частот. Установить, от чего зависит уровень выходного сигнала такого дифференцирующего устройства.
2. Проверить возможность применения для целей дифференцирования сигнала простейшей дифференцирующей r-сцепочки (рис.4)
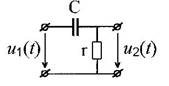
Рис.4 Дифференцирующая r-c цепочка
Так как суммирование u1 (t) и ![]() происходит на высокоомных входах сумматора, можно считать, что r-сцепочка используется в режиме холостого хода на ее выходе. Не задавая конкретных значений rи с, вывести в общем виде амплитудно-частотную (АЧХ) и фазо-частотную (ФЧХ) характеристики рассматриваемой r-сцепочки, сравнить их с АЧХ и ФЧХ идеального дифференцирующего устройства и сделать вывод о принципиальной возможности проведения с ее помощью операции дифференцирования сигнала u1 (t) в интересующем нас диапазоне частот от ω до kω.
происходит на высокоомных входах сумматора, можно считать, что r-сцепочка используется в режиме холостого хода на ее выходе. Не задавая конкретных значений rи с, вывести в общем виде амплитудно-частотную (АЧХ) и фазо-частотную (ФЧХ) характеристики рассматриваемой r-сцепочки, сравнить их с АЧХ и ФЧХ идеального дифференцирующего устройства и сделать вывод о принципиальной возможности проведения с ее помощью операции дифференцирования сигнала u1 (t) в интересующем нас диапазоне частот от ω до kω.
3. В случае положительного результата по п.2 выбрать параметры r-c-цепочки, исходя из выбранных критериев качества работы устройства. Определить и построить АЧХ и ФЧХ устройства. С их помощью определить выходное напряжение u2 (t) дифференцирующего устройства и построить график u2 (t).Проанализировать полученный результат с точки зрения следующих критериев:
а) достаточен ли уровень полезного сигнала для его дальнейшего использования в системе автоматического регулирования?
--> ЧИТАТЬ ПОЛНОСТЬЮ <--