Курсовая работа: Выбор оборудования для выполнения закрепок при изготовлении школьного жилета и проектирование механизма иглы
а=7…14
в=1,5…3
1820–9
1820–10
1820–11
а=1,5…2,5
в=11…16
в=4…7
в=7…11
40
20
28
а=10
в=18
а=39±1,0
в=23±1,0
Краткое описание конструкции машины.
Швейная головка устанавливается на крышке двухстоечного промышленного стола. На ней крепятся также светильник и стойка бобинодержателя. Под крышкой расположены пульт управления, электродвигатель, педаль управления и ящик для инструментов.
15 модификаций, разработанных на основе этого полуавтомата, отличаются формой профиля кулачка и конструкцией механизма прижима материала. (см. табл. 1)
Рабочими органами полуавтомата являются: вертикальная игла, совершающая возвратно-поступательное движение;колеблющийсячелнок; шарнирный нитеподатчик; координатник с зажимом,обеспечивающий перемещение материала в горизонтальной плоскостипод иглой; дополнительная лапка, удерживающая материал приподъеме иглы и образовании петли-напуска; электропривод, осуществляющий пуск, автоматический останов иглы в верхнем положении и управление электромагнитами механизмов обрезки ниток, подъема лапки и освобождения нитки.
Режим работы полуавтомата задается оператором путем нажатия на педаль. При нажатии педали носком происходит включение полуавтомата. При срабатывании выключателя электрического сигнала конца цикла включаются механизмы обрезки нитки и ее освобождения, затем полуавтомат останавливается в положении «игла вверху». При нажатии на педаль пяткой лапка поднимается и игольная нитка отводится. Полуавтомат подготовлен к следующему циклу работы.
Цикл работы всех механизмов по образованию стежка соответствует одному обороту главного вала.
Передача вращения от электропривода на шкив 21 (см. рис. 3) осуществляется клиновым ремнем. Далее через барабаны 20, 18 и ремень 19 вращение передается валу 10. Через кривошипно-шатунный механизм и эксцентрик 9 вращательное движение вала 10 преобразуется в возвратно-поступательное движение игловодителя 7 и дополнительной лапки 1.
Челнок 41 совершает колебательное движение от вала 25 через кривошип 36, шатун 37, зубчатый сектор 38 и вал-шестерню 39. Передача вращения от вала 25 копиру 26 осуществляется через червячную пару 27, 29, зубчатую пару 30, 31 и вал 28. Копир 26 крепится к валу 28 винтами 22. На копире имеются криволинейные пазы, определяющие форму строчки, выполняемой полуавтоматом на изделии.
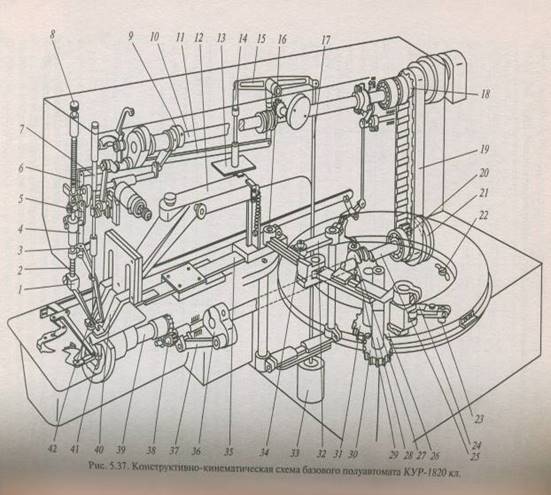
Рис. 3. Конструктивно-кинематическая схема базового полуавтомата КУР-1820 кл.
При вращении копира 26 ролики 23 и 34, закрепленные на рычагах 24 и 32 и расположенные в пазах копира, передают движение через кулисные механизмы ползуну 35. На ползуне 35 смонтирована рамка 12 с лапками 40, перемещающаяся вдоль платформы (продольное перемещение) и одновременно совершающая поворотное движение (поперечное перемещение) с помощью ползуна.
Подъем лапок 40 осуществляется электромагнитом 33 через тягу 17, рычаг 15, серьгу 14, штангу 13. Одновременно через звено 11, рычаг 6, звено 5, рычаг 4 и стержень 2 происходят подъем лапки 1 и через клемму 3 – отводка обрезанной нитки нитеотводчиком 42. Давление лапки 1 на материал регулируется поворотом гайки 8.
Чтобы строчка была высококачественной, нужно перед установкой рамки 12 проверить правильность установки лапок. Расстояние между серединой лапок 40 в продольном направлении и осью 16 поворота рамки 12 должно быть 230 мм.