Реферат: Автоматическое управление. Следящие системы
 Введение
Введение
Термин «автоматическое управление» означает процесс управления техническим объектом без вмешательства человека. При этом объект управления должен быть способен воспринимать управляющие воздействия – сигналы, содержащие информацию о том, что должно в них произойти. В большинстве случаев эти сигналы генерируются специальным управляющим устройством на основе информации о текущем состоянии объекта и его окружении. Таким образом, предметом автоматического управления, как раздела технической кибернетики, являются информационные связи и потоки в системе, образуемой объектом управления и управляющим им устройством, безотносительно к их физической природе и конкретному техническому исполнению.
Тот же принцип управления используется в следящих системах.
Следящая система управления — вид системы автоматического управления, в которой заранее неизвестен вид управляющего воздействия. Обычно следящие системы предназначены для воспроизведения на выходе изменения управляющего воздействия, слежения за ним. Они представляют собой особый класс систем автоматического управления, в которых изменения происходят по любому закону. Входной сигнал непрерывно обрабатывается системой, при этом заданное входное воздействие, обрабатываемое системой, изменяется произвольно в широких пределах.
В системах автоматического управления, которые состоят только из основных функционально необходимых элементов, служащих для реализации того или иного принципа регулирования, хотя и уменьшаются ошибки по сравнению с системами без регулятора, обычно не удаётся получить требуемых показателей качества. Для улучшения показателей качества вводят в системы автоматического управления корректирующие цепи. Одна из таких цепей дифференцирующая фазоопережающая.
1 Общая часть
1.1 Описание системы и требования, предъявляемые к ней
 |
Схема дифференцирующей фазоопережающей цепи наиболее распространена и называется, также форсирующей цепи или цепью быстрого реагирования. Данная схема представлена на рисунке 1.
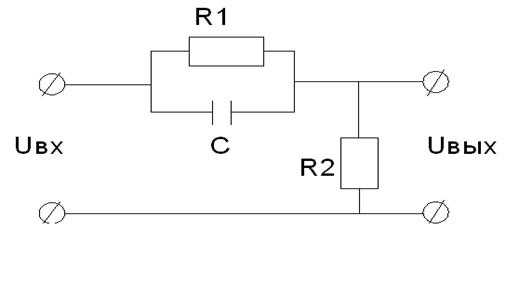
Рисунок 1
Передаточная функция этой цепи имеет вид:
![]() ;
;
где ![]() – коэффициент усиления цепи;
– коэффициент усиления цепи;
![]() и
и ![]() – постоянные времени цепи, характеризующие соответственно опережение и отставание (поскольку
– постоянные времени цепи, характеризующие соответственно опережение и отставание (поскольку ![]() , то
, то ![]() )
)
 Следящая система состоит из объекта регулирования, автоматического регулятора (управляющее устройство), исполнительного механизма, преобразующего выходной сигнал регулятора в сигнал управления объектом, датчика и измерительного преобразователя. Функциональная схема следящей системы представлена на рисунке 2. Следящие системы, которые состоят только из основных функционально необходимых элементов, служащих для реализации того или иного принципа регулирования, хотя и уменьшаются ошибки по сравнению с системами без регулятора, обычно не удаётся получить требуемых показателей качества. Для улучшения показателей качества вводят в системы автоматического регулирования корректирующие цепи.
Следящая система состоит из объекта регулирования, автоматического регулятора (управляющее устройство), исполнительного механизма, преобразующего выходной сигнал регулятора в сигнал управления объектом, датчика и измерительного преобразователя. Функциональная схема следящей системы представлена на рисунке 2. Следящие системы, которые состоят только из основных функционально необходимых элементов, служащих для реализации того или иного принципа регулирования, хотя и уменьшаются ошибки по сравнению с системами без регулятора, обычно не удаётся получить требуемых показателей качества. Для улучшения показателей качества вводят в системы автоматического регулирования корректирующие цепи.
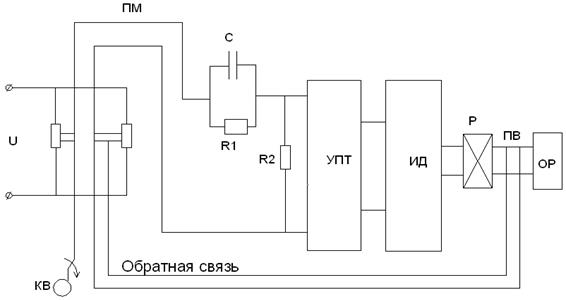
Рисунок 2
Рассмотрим пример следящей системы. В данной системе элементом сравнения служит потенциометрический мост ПМ, питаемый постоянным напряжением, а в качестве усилителя применен усилитель постоянного тока УПТ.
Требованиями для данной системы являются:
- запас устойчивости системы по фазе φ=400 ;
- достижение максимального значения коэффициента усиления, при котором обеспечивается заданная динамическая точность;
- выбор величины постоянной времени производной, позволяющей
 скомпенсировать влияние наиболее инерционного звена системы;
скомпенсировать влияние наиболее инерционного звена системы;
- выбор значения постоянной времени отставания так, чтобы вводимая цепь благодаря знаменателю передаточной функции вносила запаздывание в область более высоких частот;
- логарифмическая амплитудно-частотная характеристика (ЛАЧХ)
Системы должна пересекать ось L(ω)=0Дб, при частоте, равной меньшей частоте сопряжения системы;
- достаточный запас устойчивости;
- уменьшение инертности системы;
- уменьшенная величина погрешностей.
Очень важными требованиями к данной системе являются обеспечение высокой надежности, как относительно сохранения параметров, так безаварийность и ремонтопригодность.
Стабильность позиционирования и обработки в значительной степени зависит от стабильности электромеханической системы приводов подач, которая определяется стабильностью её звеньев.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--