Реферат: Динамические ошибки в системах авторегулирования
Введение
Современная теория автоматического регулирования является основной частью теории управления. Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения), изменяются регулируемые переменные. Цель же регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений. Решение данной задачи во многих случаях осложняется наличием случайных возмущений (помех). При этом необходимо выбирать такой закон регулирования, при котором сигналы управления проходили бы через систему с малыми искажениями, а сигналы шума практически не пропускались.
Теория автоматического регулирования прошла значительный путь своего развития. На начальном этапе были созданы методы анализа устойчивости, качества и точности регулирования непрерывных линейных систем. Затем получили развитие методы анализа дискретных и дискретно-непрерывных систем. Можно отметить, что способы расчета непрерывных систем базируются на частотных методах, а расчета дискретных и дискретно-непрерывных — на методах z-преобразования.
В настоящее время развиваются методы анализа нелинейных систем автоматического регулирования. Нарушение принципа суперпозиции в нелинейных системах, наличие целого ряда чередующихся (в зависимости от воздействия) режимов устойчивого, неустойчивого движений и автоколебаний затрудняют их анализ. Еще с большими трудностями встречается проектировщик при расчете экстремальных и самонастраивающихся систем регулирования.
1. Описание исходной схемы автоматического регулирования
Поскольку объект регулирования является элементом или звеном АСР, то свойства АСР зависят, прежде всего, от свойств объекта регулирования. Поэтому для создания работоспособной АСР обеспечивающей требуемое качество регулирования, необходимо, прежде всего, знать свойства объекта регулирования (спастические и динамические).
Объект регулирования лабораторного стенда представляет собой объект с распределенными параметрами, т.к. регулируемая величина (температура) неодинакова в различных точках объекта как в равновесном состоянии, так и переходном режиме.
Для увеличения инерционности объекта, которая должна быть в десять раз больше измеряемого в этом объекте датчиком, предусмотрен металлический стакан, наполненный стружкой, а котором расположен датчик температуры. Это поз.воляет увеличить теплообъем объекта.
Требуемая температура (эталонная) задается устройством на входе регулятора-задатчиком (tэ).
Фактическая температура преобразуется в сигнал устройством tф. Обозначая сигналы на выходе этих устройств аналогичными им буквами, выразим отклонение фактическое от требуемого в виде сигнала: ∆t = tэ – tф ; называемого отклонением или рассогласованием. Регулятор преобразует ∆t по определенному закону управления и включает исполнительное устройство. В нашем случае задача регулятора – ликвидность отклонения ∆t, вызванные действием возмущений В, т.е. различных нагрузок на объекты управления (изменение окружающей температуры, изменение положения шибера и т.д.).
Может возникнуть еще ошибка ∆t за счет изменения tэ, но, поскольку является известной заранее функцией, ошибка также может быть рассчитана заранее и скомпенсирована. Подобная система называется системой программного регулирования или просто САР.
В стенде предусмотрено двухпозиционное регулирование. При этом необходимо открыть заслонку, чтобы электронагревательный элемент постоянно обдувался воздухом. Регулирование температуры происходит за счет включения или выключения релейным элементом нагревательного элемента.
Для определения динамических свойств объекта в стенде установлен самопишущий прибор, который регистрирует изменения температуры в объекте и фиксирует их на диаграммной ленте.
Любой технологический агрегат, являющийся объектом регулирования ОР, работает в установившемся режиме, если в нем полностью соблюдается материальный и энергетический баланс. Основной параметр, характеризующий условия протекания технологического процесса (в нашем объекте это температура) в установившемся состоянии остается неизменной.
Зависимость выходной величины от входной величины в установившемся режиме называется статической характеристикой ОР. Статические характеристики могут быть как линейными, с различными коэффициентами наклона, так и нелинейными, при чем большинство реальных объектов в целом имеют нелинейные.

Рис 1. Статические характеристики ОР.
Эти характеристики ОР дают возможность оценить степень связи между различными входными и выходными величинами объекта.
Статические характеристики определяют расчетным или экспериментальным путем.
Динамической характеристикой объекта регулирования называется зависимость выходной величины от входной величины в переходном режиме.
Поскольку имения выходной величины ОР при различных возмущениях могут происходить по-разному, для исследования динамических характеристик объекта обычно используют типовые внешние воздействия.
Кривая разгона САР температуры (рис.2.) указывает динамические свойства ОР.
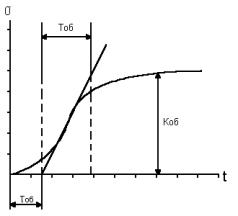
Рис 1.2. Кривая разгона
По рисунку видно, что объект обладает способностью постепенно приостанавливать отклонение выходной величины от первоначального значения и вновь восстанавливается равновесное состояние, т.е. объект обладает свойством самовыравнивания. Такие объекты называются статическими.
Объект обладает запаздыванием Тоб, и т.к. оно не значительно, в дальнейшем им будем пренебрегать.
Постоянная времени объекта Тоб – это условное время, в течение которого выходная величина изменилась бы от начального до нового установившегося значения, если бы это изменение происходило со скоростью, постоянной и максимальной для данного переходного процесса. Постоянная времени характеризует инерционность объекта, под которой понимают его способность замедленно накапливать и расходовать вещество и энергию, что становится возможным благодаря наличию в составе ОР сопротивлений и емкостей, препятствующих их поступлению и выходу.
Коэффициент передачи Коб ОР, представляет собой изменение выходной величины объекта при переходе из начального в новое в установившееся состояние, отнесенное к единичному возмущению на входе.
Единичным возмущением считают однопроцентное изменение входной величины объекта (перемещение регулирующего органа).
--> ЧИТАТЬ ПОЛНОСТЬЮ <--