Реферат: Электропривод экскаватора
Передаточная функция регулятора тока:
Сигнал пропорциональный току якорной цепи двигателя снимается с шунта. Поскольку I СТОП =1025 А , то из стандартного ряда выбираем шунт: I ШН = 1500 А .
Синтез регулятора скорости.
Передаточная функция объекта регулирования КРС:
Если раскрыть скобки и пренебречь членом перед р2 , в силу его незначительной маленькой величины, получим:
Желаемая передаточная функция разомкнутого КРС:
где: КОС – коэффициент обратной связи по скорости;
аС = 2 – отношение постоянных времени в оптимизированном контуре регулирования скорости при настройке на модульный оптимум;
В итоге получаем передаточную функцию регулятора скорости:
Наибольшее выходное напряжение задатчика интенсивности, т.е. максимальное задание по скорости:
U ЗС max =КОС × w О ;
где: w О – скорость идеального холостого хода;
U ЗС max = 10 В;
Из этого выражения следует:
![]()
![]()
 с-1 ;
с-1 ;

Структурная схема электропривода в абсолютных единицах приведена на рисунке 4.3.
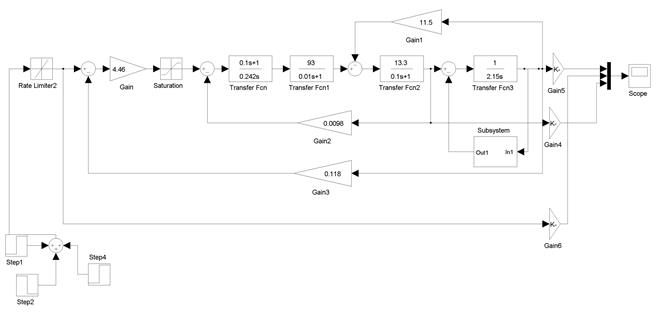
Рисунок 4.3 - Структурная схема электропривода в абсолютных единицах
4.3 Расчет структурной схемы в относительных единицах
Для расчета структурной схемы привода в о.е. необходимо принять базисные значения переменных. Базисные значения выбираются таким образом, чтобы коэффициенты обратных связей были равны 1. Перевод параметров схемы замещения в о.е. необходим для наглядного представления характера изменения во времени переменных в одной системе координат.
Сопротивление якорной цепи: