Реферат: Электропривод подъемного механизма крана
АННОТАЦИЯ
Лагутин Д.В. Электропривод подъемного механизма крана
В работе приведен выбор схемы электропривода подъемного механизма крана, выбран и проверен двигатель, а также силовые элементы. Исследованы статические и динамические свойства системы и рассчитаны энергетические показатели за цикл работы привода.
Страниц 50, рисунков 15.
ВВЕДЕНИЕ
Рассматривая все многообразие современных производственных процессов, в каждом конкретном производстве можно выделить ряд операций, характер которых является общим для различных отраслей народного хозяйства. К их числу относятся доставка сырья и полуфабрикатов к истокам технологических процессов и межоперационные перемещения изделий в процессе обработки, погрузочно-разгрузочные работы на складах, железнодорожных станциях и т. д.
Механизмы, выполняющие подобные операции, как правило, универсальны и имеют общепромышленное применение, в связи, с чем и называются общепромышленными механизмами. Общепромышленные механизмы играют в народном хозяйстве страны важную роль.
На промышленных предприятиях наиболее распространенным и универсальным подъемно-транспортным устройством является кран, основным механизмом которого является механизм подъема, который снабжается индивидуальным электроприводом.
Основные механизмы таких установок, как правило, имеют реверсивный электропривод, рассчитанный для работы в повторно-кратковременном режиме. В каждом рабочем цикле имеют место неустановившиеся режимы работы электропривода: пуски, реверсы, торможения, оказывающие существенное влияние на производительность механизма, на КПД установки и на ряд других факторов. Все эти условия предъявляют к электроприводу сложные требования в отношении надежности и безопасности. От технического совершенства электроприводов в значительной степени зависят производительность, надежность работы, простота обслуживания. Кран позволяет избавить рабочих от физически тяжелой работы, уменьшить дефицит рабочих в производствах, отличающихся тяжелыми условиями труда.
В данной работе электропривод рассматривается как общепромышленная установка, в качестве которой выступает подъемный механизм крана. Целью работы является закрепление, углубление и обобщение знаний в области теории электропривода путем решения комплексной задачи проектирования электропривода конкретного производственного механизма (механизма подъема крана). В выпускной работе охватываются такие вопросы, как выбор схемы электропривода, разработка системы управления электроприводом, анализ динамических свойств замкнутой и разомкнутой системы, расчет энергетических показателей электропривода. Основное внимание уделяется задаче регулирования координат (тока и скорости).
1. ВЫБОР СХЕМЫ ЭЛЕКТРОПРИВОДА И СИЛОВЫХ ЭЛЕМЕНТОВ.
1.1. Исходные данные для проектирования.
Электропривод подъемного механизма крана.
| Грузоподъемность, кг | 3000 |
| Масса захватного приспособления, кг | 25 |
| Диаметр барабана, мм | 490 |
| Передаточное число редуктора | 85 |
| Кратность полиспаста | 1 |
| КПД передачи | 0,8 |
| Скорость подъема, м/мин | 25 |
| Высота подъема, м | 12 |
| Продолжительность включения механизма, % | 15 |
Система электропривода: электропривод постоянного тока по системе
ТП-Д. Пуск и торможение производится при линейном изменении э.д.с. преобразователя в функции времени.
Требования, предъявляемые к электроприводу.
При разработке электропривода крана должны быть соблюдены следующие требования в отношении его характеристик:
- обеспечение заданной рабочей скорости механизма при статических моментах на валу при подъеме и спуске;
- возможность реверсирования;
- обеспечение минимального времени переходного процесса;
- обеспечение плавности пуска и регулирования;
- ограничение максимального значения момента стопорным значением Мстоп .
1.2. Выбор схемы электропривода.
Для осуществления автоматического регулирования предусматриваются управляемые преобразователи и регуляторы, позволяющие автоматически под воздействием обратных связей осуществлять регулирование координат электропривода, в нашем случае момента и скорости. Наиболее широко используются электромашинные и вентильные управляемые преобразователи напряжения постоянного тока и частоты переменного тока и соответствующие системы ЭП: система генератор – двигатель (Г-Д); система тиристорный преобразователь – двигатель (ТП-Д); система преобразователь частоты – асинхронный двигатель (ПЧ-АД). Также скорость и момент можно изменять путем реостатного регулирования. Выбор рационального способа регулирования из возможных является важной задачей, которая решается при проектировании электропривода.
Все вышеперечисленные системы имеют ряд преимуществ и недостатков, анализ которых при учете предъявляемых технических требований и специфики производственного механизма позволяет осуществить правильный выбор системы регулирования.
Так, в настоящее время продолжает успешно применяться система Г-Д. Ее основными достоинствами являются отсутствие искажений потребляемого из сети тока и относительно небольшое потребление реактивной мощности. При применении синхронного двигателя в преобразовательном агрегате путем регулирования тока возбуждения можно обеспечить работу ЭП с cosjдля компенсации реактивной мощности, потребляемой другими установками.
К сожалению, системе Г-Д присущи несколько серьезных недостатков, определяемых необходимостью трехкратного электромеханического преобразования энергии. Как следствие – низкие массогабаритные и энергетические показатели, и благоприятные регулировочные возможности достигаются ценой существенных затрат дефицитной меди, высококачественной стали и труда. Наряду с этим характерен низкий общий КПД системы.
Существенные преимущества асинхронного двигателя определяют несомненную перспективность системы ПЧ-АД. Однако регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, так как, как правило, требует дополнительных ступеней преобразования энергии. Коэффициент полезного действия системы ПЧ-АД ниже, чем в системе ТП-Д, ниже быстродействие и экономичность.
Рассматривая способ реостатного регулирования нельзя не отметить его низкую точность и диапазон регулирования, невысокую плавность, а также массогабаритные показатели (наличие резисторов, коммутирующей аппаратуры) и снижение КПД при увеличении диапазона регулирования. Однако данный способ привлекателен своей простотой и невысокими затратами на реализацию.
В выпускной работе разрабатывается электропривод постоянного тока по системе ТП-Д. Эта система в настоящее время наиболее широко используется из-за ее несомненных преимуществ. Она более экономична, обладает высоким быстродействием (постоянная времени Тп при полупроводниковой СИФУ не превосходит 0,01 с), имеет довольно высокий КПД. Потери энергии в тиристорах при протекании номинального тока составляет 1-2% номинальной мощности привода.
Недостатками тиристорного преобразователя является изменяющийся в широких пределах cosj»cosa, и значительное искажение формы потребленного из сети тока.
Схему преобразователя выберем мостовую реверсивную с совместным согласованным управлением.
 |
1.3. Расчет нагрузочных диаграмм и выбор двигателя.
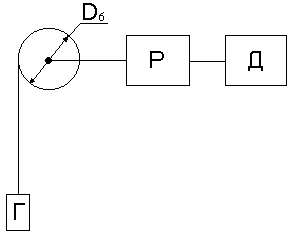
Рис. 1. Кинематическая схема механизма.
Статические моменты при подъеме и спуске:
![]() Нм
Нм
![]() Нм,
Нм,
где g – ускорение свободного падения,
--> ЧИТАТЬ ПОЛНОСТЬЮ <--