Реферат: Электропривод подъемного механизма крана
Коэффициент обратной связи по скорости:
 В/с
В/с
Коэффициент усиления П-регулятора
![]() .
.
Максимальная скорость холостого хода:
![]()
Зададимся Rосс =100 кОм, тогда:
![]() Ом
Ом
Допустим, используется тахогенератор с kтг =0,32 Вс. Тогда при w0 =w0з .max максимальная ЭДС тахогенератора:
![]() В.
В.
Сопротивление в цепи обратной связи по скорости:
![]() кОм.
кОм.
2.3. Расчет и построение статических характеристик в замкнутой системе.
В замкнутой системе при М<119,37 Нм, уравнение статической характеристики:
![]()
![]()
При М=Мстоп =119,37 Нм скорость равна:
![]() 1/с.
1/с.
2.4. Разработка схемы управления электроприводом.
Схема управления электроприводом выполнена на базе операционных усилителей постоянного тока и включает в себя регулятор тока (АА), регулятор скорости (AR), датчик интенсивности SJ. Тахогенератор BR с делителем напряжения R3 и R1 является датчиком скорости. Сигнал задания формируется в блоке задания. Уровень сигнала задания изменяется потенциометром RP, а его полярность задается с помощью реле KV1 и KV2 (движение вперед и назад). Реле KF – реле обрыва поля.
При включении автоматических выключателей QF, QF1, QF2 подается питание на силовую схему и схему управления. Срабатывает реле KF и замыкает свой главный контакт в схеме управления. При нажатии на кнопку SB1 (Подъем) происходит срабатывание реле KV1, которое замыкает свои контакты в схеме управления и в силовой цепи. Происходит подъем груза. При подъеме груза на максимальную высоту происходит срабатывание SQ2 и двигатель останавливается. Чтобы осуществить спуск груза, необходимо нажать на кнопку SB2 (Спуск). В этом случае срабатывает реле KV2, в силовой цепи и цепи управления срабатывают его контакты. Начинается спуск груза, который продолжается до замыкания конечного выключателя SQ1. Для остановки подъема или опускания груза предусмотрена кнопка SB3 (Тормоз).
Схема управления представлена на рис. 12.
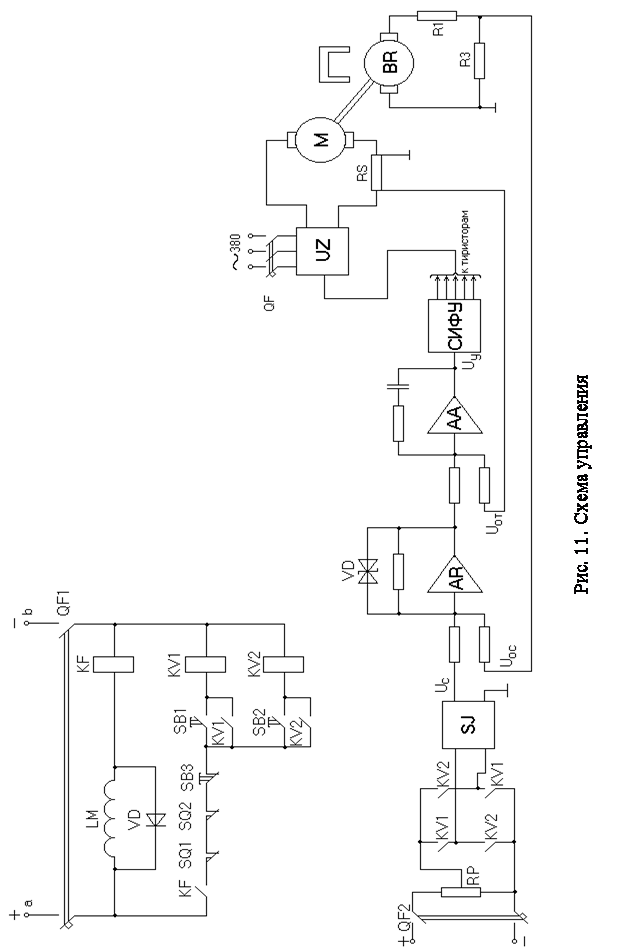
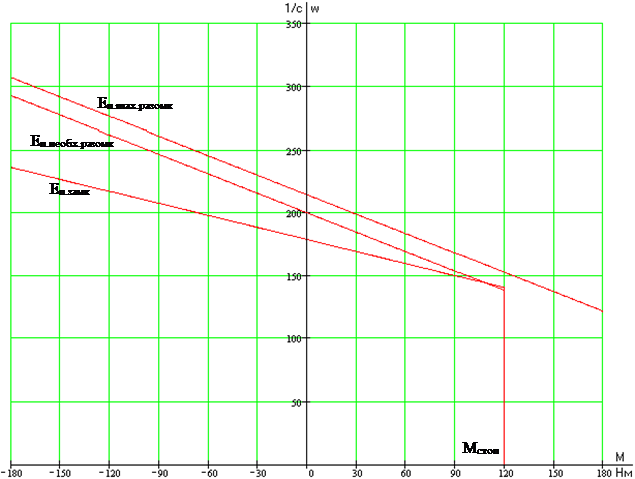
Рис. 12. Статическая характеристика в замкнутой системе.
Выводы по главе 2.
В главе 2 были рассчитаны и построены статические характеристики в разомкнутой системе, а также уточненная нагрузочная диаграмма двигателя за цикл при линейном изменении ЭДС преобразователя. Выбрана структура замкнутой системы – система с подчиненным регулированием координат с настройкой на технический оптимум. Построены статические характеристики электропривода и разработана схема управления.
3. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ ЗАМКНУТОЙ СИСТЕМЫ.
3.1. Математическое описание электропривода.
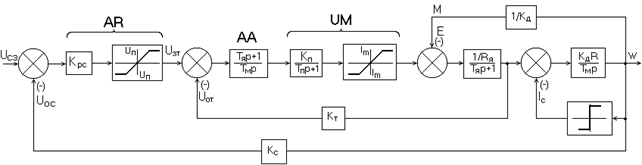
Структурная схема электропривода с внешним контуром регулирования скорости и внутренним контуром тока якоря изображена на рис. 13.
Рис. 13. Структурная схема ЭП с подчиненным регулированием параметров.
Пропорциональный регулятор скорости AR и пропорциональный регулятор тока AA формируют управляющие воздействия из сигналов задания Uсз и Uзт и обратных связей Uос и Uот .
Работу электропривода с представленной структурой опишем системой алгебраических и дифференциальных уравнений, принимая во внимание, что коэффициент передачи регулятора скорости и постоянная времени регулятора тока равны соответственно:
![]() ;
; ![]() .
.
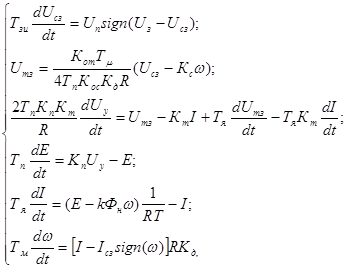
где Тзи – постоянная времени задатчика интенсивности;