Реферат: Исследование системы программного регулирования скорости вращения рабочего органа шпинделя
Теория автоматического управления сформировалась в самостоятельную науку, в первую очередь на основе изучения процессов управления техническими устройствами. Изучение принципов построения и исследования систем автоматического управления в курсе ОТУ проводится на основе рассмотрения управления различными техническими устройствами, и первое понятие, которое конкретизирует довольно широкое поле деятельности этого курса является автоматическое регулирование. Под автоматическим регулированием понимают поддержание на определенном уровне или изменение по закону некоторых переменных характеристик (регулируемых величин) в машинах и агрегатах без участия человека с помощью различного рода технических средств.
Рассматриваемые принципы управления имеют более широкий общий смысл и могут быть применены при изучении процессов управления в совершенно иных системах, например, в биологических, экономических, социальных и др.
Исходные данные
 |
?????? ??????? ??????????? ????????????? ???????? ???????? ???????? ?????? ????????.
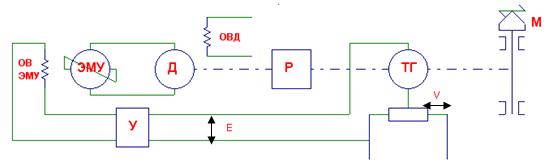
Рис. 1
На рис.1 использованы следующие обозначения:
- ОВ ЭМУ – обмотка возбуждения ЭМУ.
- ЭМУ - электромагнитный усилитель.
- Д - двигатель постоянного тока
- ОВД – обмотка возбуждения двигателя.
- Р – редуктор.
- ТГ – тахогенератор.
- У – электронный усилитель.
- E - ошибка рассогласования.
- V - скорость изменения напряжения.
- М – момент инерции шпинделя.
Система регулирования работает следующим образом: с электронного усилителя У усиленный сигнал рассогласования Е поступает на обмотку возбуждения ЭМУ (ОВ ЭМУ), ток, проходящий через ОВ ЭМУ меняется, изменяя тем самым величину магнитного потока, действующего на ротор электромагнитного усилителя (ЭМУ) - увеличивая или уменьшая скорость его вращения, и в зависимости от этих изменений меняется скорость и направление вращения двигателя (Д). Двигатель (Д) , редуктор (Р) , тахогенератор (ТГ) и шпиндель находятся в жесткой механической связи, поэтому изменения в скорости и в направлении вращения двигателя вызывают соответствующие изменения в скорости и в направлении вращения рабочего органа шпинделя, а также в работе тахогенератора (ТГ) , который передвигает ползунок реостата в сторону изменения ошибки несогласования E .
Требуется:
1. Составить структурную схему и вывести уравнения, которыми описываются отдельные элементы и вся система регулирования в целом. Определить коэффициент усиления усилителя из заданной точности.
2. Определить устойчивость и качество переходных процессов в системе с помощью частотных методов.
3. Скорректировать систему.
4. Построить переходный процесс в системе и оценить его качество.
Дано:
| Тэ1 | Тэ2 | Тд | Кэму | Кд | Кред | Ктг |
E,% | V |
| 0,1 | 0, 7 | 2,5 | 4 | 3 | 2 | 0,1 | 0,4 | 0,5 |
1.Структурная схема системы.
На основании принципиальной схемы (рис. 1) составим структурную схему (рис. 2) и рассмотрим все ее элементы для получения передаточной функции всей системы.
 |
Рис. 2
1.1 Усилитель.

![]()
![]() (1)
(1)
где Ky – коэффицент усиления электронного усилителя.
1.2 ЭМУ