Реферат: Кинематика материальной точки
"Кинематика материальной точки"
Москва, 2010
Введение
Кинематика - это раздел физики, посвящённый математическому описанию движения без анализа причин, приводящих к его возникновению или изменению. Причиной изменения или возникновения движения является сила, а сила по II-у закону Ньютона связана с массой. Поэтому для того, чтобы исключить из рассмотрения силу достаточно не рассматривать массу. При этом кроме силы из рассмотрения выпадают многие механические понятия: импульс, энергия, момент импульса. А что остаётся, то и рассматривается в кинематике. Таким образом, кинематику можно было бы назвать механикой без массы.
Самый простой объект, способный двигаться - это материальная точка: тело, размеры которого пренебрежимо малы в условиях данной физической задачи. Движением материальной точки называется смена её положения с течением времени. Поэтому первое кинематическое понятие, с которым мы сталкиваемся - это положение.
1. Вектор положения
Положение чего угодно невозможно задать само по себе. Всё находится относительно чего-то. Значит, мы должны сначала установить начало отсчёта (точку О), а это невозможно сделать по-другому, кроме как поставив туда какое-либо материальное тело (тело отсчёта). И от этого «главного» тела уже можно проводить геометрические векторы, соединяющие начало отсчёта с тем или иным положением материальной точки.
Геометрическим вектором называется направленный отрезок, соединяющий положения двух материальных точек.
Геометрический вектор, соединяющий тело отсчёта с материальной точкой, называется вектором положения материальной точки.
При задании положения материальной точки относительно тела отсчёта последнее по определению считается неподвижным. Поэтому все возможные векторы положений начинаются из одной точки и называются радиус-векторами ![]() .
.

Совокупность всех возможных радиус-векторов образует пространство.
Смена начала отсчёта приводит к изменению всех радиус-векторов. Каким образом? Ответ зависит от системы постулатов, которыми мы собираемся пользоваться. Классическая механика, которую мы в основном и изучаем, использует постулаты Галилея-Ньютона.
Если положение материальной точки М относительно тела отсчёта в точке О обозначить ![]() , относительно другого тела отсчёта в точке О' обозначить
, относительно другого тела отсчёта в точке О' обозначить ![]() , а геометрический вектор, соединяющий точки О и О' , обозначить
, а геометрический вектор, соединяющий точки О и О' , обозначить ![]() , то наблюдатель в точке О будет видеть три геометрических вектора:
, то наблюдатель в точке О будет видеть три геометрических вектора: ![]() ,
, ![]() и
и ![]() .
.

Пусть другому наблюдателю в точке О' нет дела ни до чего, кроме материальной точки М . В дальнейшем системе отсчёта с нелюбопытным наблюдателем будет отводиться «второстепенная» роль. В противовес этому система с наблюдателем, который видит всё, будет считаться «основной». В общем, наблюдатель О' видит только один вектор ![]() . Как соотносится геометрический вектор
. Как соотносится геометрический вектор ![]() , видимый в пространстве О' с геометрическим вектором
, видимый в пространстве О' с геометрическим вектором ![]() , видимым в пространстве О ? Ответ на этот вопрос даёт первый постулат Галилея: геометрические векторы в разных системах отсчёта одинаковы. Т.е.
, видимым в пространстве О ? Ответ на этот вопрос даёт первый постулат Галилея: геометрические векторы в разных системах отсчёта одинаковы. Т.е. ![]() . Тогда предыдущий рисунок можно переделать так:
. Тогда предыдущий рисунок можно переделать так:
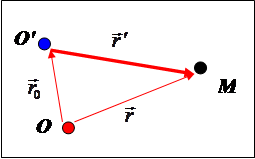
И правило сложения векторов по треугольнику позволяет записать соотношение между тремя векторами:
![]() .
.
В соответствии с этим соотношением можно находить положения в «основной» системе отсчёта, зная их во «второстепенной». Такое преобразование радиус-векторов будем называть обратным преобразованием Галилея. Соответственно, прямое преобразование позволяет находить положения во «второстепенной» системе отсчёта, зная их в «основной»:
![]()
В дальнейшем какая-либо величина в «основном» пространстве будет называться «абсолютной », во «второстепенном» пространстве - «относительной» , а та, через которую они связаны, -переносной. Значит
· ![]() -«абсолютный» радиус-вектор;
-«абсолютный» радиус-вектор;
· ![]() -«относительный» радиус-вектор;
-«относительный» радиус-вектор;
· ![]() - переносный радиус-вектор.
- переносный радиус-вектор.
Итак, в соответствие с первым постулатом Галилея смена начала отсчета приводит к изменению пространства, которое описывается преобразованием Галилея. Это означает, что пространство относительно.
2. Траектория движения
Используя понятие радиус-вектора, движение можно описать функциональной зависимостью ![]() , где t - время. Поскольку положение относительно, то и движение относительно. Относительны и все понятия, связанные с ним. Первым из таких понятий мы рассмотрим траекторию.
, где t - время. Поскольку положение относительно, то и движение относительно. Относительны и все понятия, связанные с ним. Первым из таких понятий мы рассмотрим траекторию.
Траекторией называется совокупность положений, пройденных телом в процессе движения.
Тело не может в один и тот же момент времени находиться в разных положениях. Поэтому траектория представляет собой линию, и при этом линию непрерывную . В зависимости от формы траектории различают прямолинейное и криволинейное движение. Если криволинейная траектория лежит в одной плоскости, то движение называется плоским.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--