Реферат: Методы и анализ нелинейного режима работы системы ЧАП. Метод фазовой плоскости
 .
.
Для горизонтальных касательных уравнение изоклины:
![]() ;
;
для вертикальных:
![]() .
.
Ось абсцисс является изоклиной вертикальных касательных. Для особых точек типа узла и седла существуют изоклины, совпадающие с фазовыми траекториями: (![]() ). Они называются сепаратрисcами.
). Они называются сепаратрисcами.
Рассмотрим пример.
Определим условия вхождения в синхронизм системы, представленной структурной схемой (рис.13), если задающее воздействие изменяется по линейному закону ![]() (t) = atи в момент включения системы при t = 0 начальная ошибка имеет конечное значение х(0) = х
(t) = atи в момент включения системы при t = 0 начальная ошибка имеет конечное значение х(0) = х![]() .
.
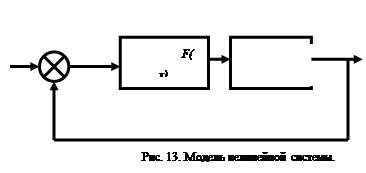
Рис.14. Дискриминационная характеристика (а) и фазовый портрет (б)
Обозначим ошибку слежения.
х(t) = х![]() =
= ![]() (t) – y(t).
(t) – y(t).
Тогда производная этой функции:
![]()
![]()
![]() =
=![]() –
– ![]() = a –
= a – ![]() .
.
Так как в качестве фильтра системы используется интегрирующее звено, то
y(t) = kF(x![]() ) /p.
) /p.
В результате уравнение ошибки примет вид
![]() = а – kF(x
= а – kF(x![]() ).
).
Обозначим
![]() = х
= х![]()
 |
и, пользуясь уравнением
х![]() = а – kF(x
= а – kF(x![]() ),
),
построим фазовый портрет системы в координатах (x![]() , х
, х![]() ) для различных значений скорости изменения задающего воздействия а.
) для различных значений скорости изменения задающего воздействия а.
При различных значениях а кривая х![]() =f(x
=f(x![]() ) перемещается параллель - но самой себе. На рис.14 изображено семейство кривых для положительной скорости а. Обозначим максимальное значение функции F(x) = F
) перемещается параллель - но самой себе. На рис.14 изображено семейство кривых для положительной скорости а. Обозначим максимальное значение функции F(x) = F![]() . Направление движения изображающей точки обозначим в соответствии с правилами: в верхней полуплоскости слева направо; в нижней – справа налево. Проанализируем фазовый портрет.
. Направление движения изображающей точки обозначим в соответствии с правилами: в верхней полуплоскости слева направо; в нижней – справа налево. Проанализируем фазовый портрет.
При а=0 ошибка слежения х![]()
![]() 0 при начальных значениях | х
0 при начальных значениях | х![]() (0) |
(0) | ![]()
![]() , что следует из направления движений на фазовой траектории. Если 0
, что следует из направления движений на фазовой траектории. Если 0![]() а
а![]() kF
kF![]() , то x
, то x![]() стремится к устойчивой точке 1, если начальное рассогласование х
стремится к устойчивой точке 1, если начальное рассогласование х![]() (0) меньше величины
(0) меньше величины![]() , соответствующей точке 2. Когда х
, соответствующей точке 2. Когда х![]() (0)
(0) ![]()
![]() , захвата не происходит, так как x
, захвата не происходит, так как x![]() неограниченно растет. Если скорость /а/
неограниченно растет. Если скорость /а/ ![]() kF
kF![]() , то захвата не будет ни при каких начальных условиях, поскольку нет устойчивых точек на фазовой траектории. Таким образом, условия захвата сигнала, изменяющегося с постоянной скоростью а, состоят в выполнении неравенства kF
, то захвата не будет ни при каких начальных условиях, поскольку нет устойчивых точек на фазовой траектории. Таким образом, условия захвата сигнала, изменяющегося с постоянной скоростью а, состоят в выполнении неравенства kF![]()
![]() а. При этом область захвата х(0)
а. При этом область захвата х(0) ![]() . Величина
. Величина ![]() находится из уравнения а – kF(
находится из уравнения а – kF(![]() ) =0. Первый корень этого уравнения соответствует точке 1 устойчивого равновесия, а второй корень, соответствующий точке 2, является искомой величиной
) =0. Первый корень этого уравнения соответствует точке 1 устойчивого равновесия, а второй корень, соответствующий точке 2, является искомой величиной ![]() .
.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш. шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов. / Под ред. В.А. Бесекерского. - М.: Высш. шк., 2005.
3. . Первачев С.В. Радиоавтоматика: Учебник для вузов. - М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации / Под ред. М.И. Жодзишского – М.: Радио, 2000