Реферат: Определение характеристик оптимального обнаружения сигналов
Выполнил: Озерин М.В. _____________________
студент 4-го курса гр. Э-15 (дата) (подпись)
Руководитель: Черницер В.М. _____________________
(дата) (подпись)
Таганрог 1999
ВВЕДЕНИЕ
При проектировании гидроакустических систем (ГАС) различного функционального назначения на этапе проектирования решаются задачи оптимизации технических характеристик ГАС и выбора структуры приемного тракта, оптимизирующего отношение сигнал-помеха. Для таких систем основными параметрами является: дальность действия, пространственная разрешающая способность. В данном случае ищут компромиссное решение между этими параметрами, отдавая предпочтение одному или другому в зависимости от стоящей перед разработчиками задачи. Расчет ведется при фиксированной дальности и поэтому выбор оптимальной частоты определяется минимальной излучающей мощности. ЗАДАНИЕ
Рассчитать и построить семейство характеристик обнаружения и определить значение порогового сигнала для исходных данных. Расчет проводится для когерентной последовательности и некогерентной последовательности импульсов при полностью известном сигнале, со случайной начальной фазой и амплитудой.
Таблица 1.1
Данные для расчеты
| 1. Максимально допустимое значение вероятности ложной тревоги Pлт.доп | 10-3 , 10-5 |
| 2. Число импульсов последовательности, n | 1, 20 |
| 3. Вероятность правильного обнаружения Po | 0,92 |
| 4. Дальность действия r, м | 1000 |
| 5. Разрешающая способность по угловым координатам, град | Qa =10Qb =10 |
| 6. Разрешающая способность по дальности Dr, м | 0,5 |
| 7. Спектрально-энергетическая характеристика шумов, № | 3.1 |
| 8. Скорость носителя VН , м/с | 15 |
| 9. Скорость цели VЦ , м/с | 5 |
| 10. Чувствительность антенны g, мкВ/Па | 300 |
| 11. Уровень шумов электронного тракта Uм эл. , мкВ | 5 |
2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
2.1. Характеристика обнаружения
Характеристиками обнаружения называются кривые, определяющие зависимость между вероятностью правильного обнаружения Ро , вероятностью ложной тревоги Pлт и величиной сигнала выраженного в относительных еденицах:
 (2.1)
(2.1)
Параметр q численно равен отношению сигнал-помеха (С/П) по напряжению на выходе согласованного фильтра (СФ). Если задано допустимое значение Pлт , то расписывается соответствующее значение Po .
2.1.1 Случай полностью известного сигнала
Условные плотности вероятности корреляционного интеграла при отсутствии сигнала W(K/0) и при наличии сигнала W(K/1) определяются из выражения:
 (2.2)
(2.2)
где величины K и Es корреляционный интеграл и энергия сигнала. При сравнении значений К с порогом Ко вероятность ложной тревоги определяется отношением порогового уровня к среднеквадратичному значению sк .
 (2.3)
(2.3)
Вероятность правильного обнаружения зависит не только от отношения порога Ко среднеквадратичному значению sк , но и от отношения
 (2.4)
(2.4)
где q – параметр обнаружения.
 (2.5)
(2.5)
В выражениях 2.3 и 2.5 в F(U) – интеграл вероятности:
 (2.6)
(2.6)
Выражение 2.5 преобразуется к виду
![]() (2.7)
(2.7)
где qo =Ko /sk .
 Если интеграл вероятности определяется в виде
Если интеграл вероятности определяется в виде
(2.6)
то выражение (2.3), (2.5), (2.6) приобретают вид
Pлт =1-Ф(qo ), (2.7)
Pлт =1-Ф(q-qo ), (2.8)
где q – параметр обнаружения.
Вероятность правильного обнаружения при заданной вероятности ложной тревоги тем больше, чем больше параметр обнаружения (рис 2.1). Пользуясь кривыми обнаружения, можно найти пороговый сигнал, т.е. сигнал, который при заданной вероятности ложной тревоги, может быть обнаружен с требуемой вероятностью правильного обнаружения Рп .
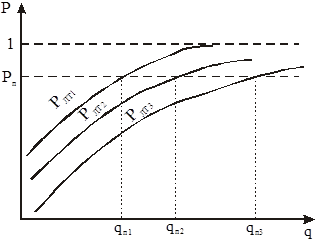 |
Рис. 2.1 Кривые обнаружения
Случай полностью известного сигнала на практике встречается редко, но его удобно использовать для сравнения различных типов устройств обнаружения.
2.2. Случай сигнала со случайной начальной фазой
Условные плотности вероятности для корреляционного интеграла при наличии сигнала:
 (2.9)
(2.9)
при отсутствии сигнала:

(2.10)
Модель корреляционного интеграла при отсутствии сигнала подчиняется релеевскому закону распределения, а при наличии сигнала, обобщенному релеевскому закону.
Максимально допустимая вероятность ложной тревоги
![]()
 (2.11)
(2.11)
а пороговое значение отношение сигнал-помеха
![]()
![]() (2.12)
(2.12)
Вероятность правильного обнаружения определяется, как
 (2.13)
(2.13)
где S – переменная интегрирования.
Когда отношение сигнал-шум равен
формулы (2.9) и (2.13) упрощается, и расчет вероятности Po можно вести по формуле
 (2.14)
(2.14)
--> ЧИТАТЬ ПОЛНОСТЬЮ <--