Реферат: Расчет переходных процессов в дискретных системах управления
Рассмотрим схему дискретной системы автоматического управления, приведенную на рис. 1.
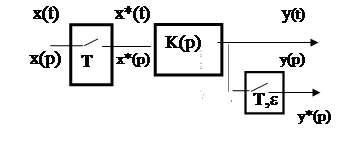 |
Рис. 1
Для выхода системы можно записать следующие соотношения между входным и выходным сигналом
 (1)
(1)
Выражение для выходной величины во временной форме имеет вид
 (2)
(2)
Определим переходную функцию дискретной системы. Дискретное преобразование единичного воздействия x(t) = 1 (t) равно x(z) = z/(z-1).
Переходную функцию определим из соотношений
 (3)
(3)
Получили выражение для расчета переходной функции дискретной системы.
Определим функцию веса дискретной системы. Дискретное изображение единичного импульса x(t) = d (t) равно x(z) = 1 .
Весовую функцию определим из соотношений
 (4)
(4)
Получили выражение для расчета функции веса дискретной системы.
Установившееся значение временных характеристик можно определить с помощью теоремы о конечном значении дискретной функции.
Для переходной функции
![]() . (5)
. (5)
Для весовой функции
![]() (6)
(6)
Определим связь между переходной функцией и функцией веса дискретной системы. Для области z можно записать следующие соотношения
![]()
Откуда
![]() (7)
(7)
Как следует из выражения (7) функция веса в каждый дискретный момент времени может быть определена как разность между текущим и предыдущим значением переходной функции
Пример 1. Для заданной системы (рис. 2.) рассчитать переходный процесс, если x(t) = 1 (t).
 |
Рис. 2
Решение
Выходной дискретный сигнал равен: ![]()
При этом

Если x(t) = 1 (t) то  . Для
. Для 
![]()
Подставим x(z) и K (z, e ) в выражение для выходного дискретного сигнала

--> ЧИТАТЬ ПОЛНОСТЬЮ <--