Реферат: Расчёт поперечно-строгального станка
4.4. Зацепление с инструментальной рейкой без смещения 18
4.5. Зацепление с инструментальной рейкой со смещением 19
5. Расчёт маховика
5.1. Исходные данные 20
5.2. Построение графика приведённого момента сил полезного сопротивления 21
5.3. Построение графика работ 22
5.4. Построение графика изменения кинетической энергии машины 23
5.5. Построение графика изменения кинетической энергии звеньев машины 23
5.6. Определение момента инерции маховика 24
5.7. Конструирование маховика 24
5.8. Расчёт привода 25
Список использованной литературы 26
1. Структурно-кинематический анализ.
1.1.1 Исходные данные.
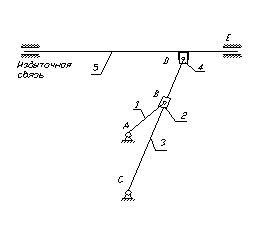
Рис. 1 Кинематическая схема долбёжного станка.
Исходные данные: Lва=140 мм. Lcd=710 мм. Lac=430 мм. Lcs3=290 мм. h=315 мм. Lcs3=0.29 м.
1.1.2 Определение недостающих размеров.
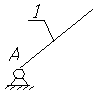
Определим угол q - между крайними положениями кулисы. Для этого рассмотрим прямоугольный треугольник АВоС, где <АВоС=90°, т.к. в крайних положениях кулиса является касательной к окружности радиусом Lab с центром в точке А.
Sin (q/2)=Lab/Lac=140/430=0.3256
q/2=arcsin0.3256=19° q=19°х2=38°
Таким образом, коэффициент скорости хода:

К=Vхх/Vрх= =1,5
1.1.3.Структурный анализ механизма.
Подвижность механизма: W=3n-2p5-p4=3*5-8*2-0=-1
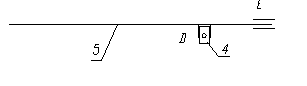
Кинематическая пара Е’ введена для того, чтобы звено 5 не работало на изгиб и не влияет на характер движения механизма. Подвижность механизма без учёта Е’ W=3*5-2*7=1.
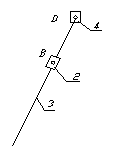 Разложим механизм на структурные группы
Разложим механизм на структурные группы
n=2 P5=3 W=3х2-2х3=0