Реферат: Следящие системы
![]()
![]()
1 1 _ K y С W _
W ос ( P ) = W охв ( P ) W к ( P ) – 1 ; W охв ( P ) = Р( T y P + 1) ( T м P + 1)
L / W к ( jω ) / = L / W ж ( jω ) / - L / W исх ( jω ) /
По разности этих характеристик определяется тип корректирующего устройства и выбираются его параметры .
В нашем случае используем часто применяемый в следящих системах с последовательным корректирующим устройством интегродифференци-рующий контур с передаточной функцией:
(Т 1 Р + 1)(Т 2 Р + 1)
W к ( P ) = (Т 3 Р + 1)(Т 4 Р + 1)
Известно, что для коррекции обратной связью на основании интегродифференцирующего контура существует передаточная функция:
Т' Р _
W ос ( P )= (Т 1 Р + 1)
Эта передаточная функция соответствует передаточной функции дифференцирующего контура.
10.
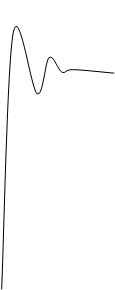
Построим переходной процесс одним из численных методов с приме-нением ЭВМ.
|
![]()
![]()
![]()
![]()
|
![]()
|
По этому графику переходного процесса проведем анализ качества следящей системы с выбранным корректирующим устройством.
Переходной процесс характеризуется перерегулированием δ = 28 % и заканчивается за время t рег = 0,02 с
Список литературы
1. А.А. Ахметжанов, А.В. Кочемасов «Следящие системы и регуляторы» для студентов вузов. - М. : Энергоатомиздат, 1986г.
2. Смирнова В.И., Петров Ю.А., Разинцев В.И. «Основы проектирования и расчета следящих систем». - М. : Машиностроение, 1983г.
3. Бесекерский В.А., Попов Е.П. «Теория систем автоматического регулирования». – М. : Наука, 1972г.