Учебное пособие: Разомкнутые системы управления
АУУ - задающий потенциометр, датчик момента, УПТ.
В этом случае при управлении по разомкнутому циклу выполняется измерение возмущающего воздействия f(t) и такое его преобразование в УУ, которое обеспечивает компенсацию его влияния на регулируемую величину y(t).
Пример СУЭП с принципом управления по возмущению - система стабилизации скорости двигателя М. (рис.6.21)
ИМ - измеритель момента (тензодатчики с токосъемом).
Напряжение задания скорости U3 суммируется с напряжением, пропорциональным Мс , на входе УПТ. Результирующее напряжение с выхода УПТ является управляющим воздействием, его зависимость от заданного значения скорости w3 и основного возмущающего воздействия Мс определяет алгоритм управления разомкнутой системы:
Uу = К3 w3 + Км Мс .
В системе без связи по возмущению (Км =0) напряжение Uд на входе двигателя определяется только заданием U3 . При изменении Мс Uд остается постоянным, поэтому скорость двигателя с увеличением Мс уменьшается.
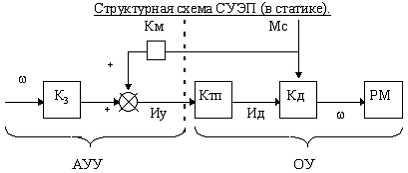
Рис. 6.22.
При наличии связи по возмущению (Км ¹0) с увеличением Мс увеличивается Uм =Км Мс , увеличивается Uу , увеличивается Uд , что при соответствующей настройке (выборе Км ) обеспечит компенсацию влияния Мс и, следовательно, независимость скорости от основного возмущающего воздействия на ОУ - Мс .
Принцип управления по возмущению в чистом виде, без обратных связей, применяется редко, т.к. может не обеспечить требуемой точности в результате влияния не компенсируемых воздействий, имеются слож?