Учебное пособие: Системы автоматического управления
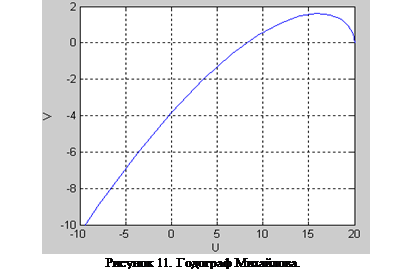
Как видно из рисунка 11, САУ с заданными параметрами неустойчива, поскольку вектор, начало которого лиежит в точке (0, 0), а конец – на кривой Михайлова, вращаясь против часовой стрелки НЕ проходит последовательно количество квадрантов, равное порядку системы – 3.
7. Проверка системы на устойчивость согласно критерию Найквиста
Построение амплитудно-фазовой характеристики (АФЧХ) разомкнутой системы выполняется в командном окне MATLAB при помощи функцииnyquist :
>> nyquist(W)
где W – переменная, несущая информацию о передаточной функции разомкнутой системы.
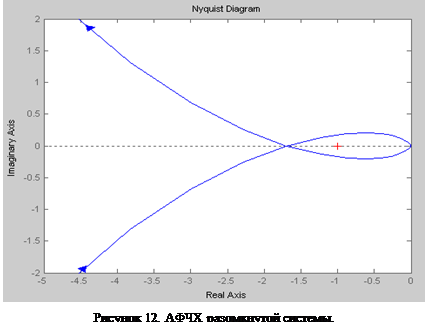
На рисунке 12 построена АФЧЧ разомкнутой системы. Поскольку АФЧХ разомкнутой системы охватывает точку с координатами (-1, j0), то, согласно критерию Найквиста САУ с заданными параметрами является неустойчивой.
Выводы
В работе был проведен анализ устойчивости замкнутой автоматической системы на основании различных критериев при помощи ПО MATLAB.
Эффективность применения ЭВМ и ПО MATLAB в исследовании САУ высокого порядка на устойчивость очевидна, как при применения алгебраических критериев устойчивости, так и графических, поскольку пакет ControlSystem обладает широким набором функций для расчета и отображения характеристик сколь угодно сложной САУ, что было показано в работе.
Лабораторная работа №3. Исследование многоконтурной системы автоматического регулирования
Цель работы
Реализовать и исследовать модель регулирования "жесткого" спутника Земли.
Программа работы
1. Исследовать переходную характеристику объекта регулирования – "жесткого" спутника Земли (ЖСЗ) в среде структурного моделирования Simulink с моментом инерции объекта J = 10 .
2. Охватить динамическую модель "жесткого" спутника обратной связью по положению и оценить устойчивость САУ.
3. Охватить динамическую модель "жесткого" спутника обратной связью по скорости и положению. Системе дана команда изменить угловое положение на 30º. Определить это положение по окончанию переходного процесса. Определить коэффициенты регулятора при следующих коэффициентах демпфирования САР: ξ=0.707, ξ=1.
4. Оценить влияние на переходную характеристику изменения коэффициента обратной связи по скорости.
5. Оценить коэффициенты регулятора, если переходный процесс должен заканчиваться за 0,3 с, при g = 0.
6. Угловая скорость спутника измеряется с помощью гироскопического датчика. Предположим, что датчик вышел из строя (Подобные ситуации действительно имели место). Какой регулятор может обеспечить процесс регулирования САР?
7. Рассмотреть систему с чистым запаздыванием. Оценить динамические свойства системы при различных временах задержки: τ = 0.1 с, τ = 0,4 с, τ = 4 с.
8. Пронаблюдать фазовую траекторию САР.
Ход работы
1. Реализация модели "жесткого" спутника Земли в Simulink
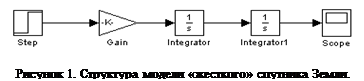
На рисунке 1 представлена структура модели "жесткого" спутника Земли для среды Simulink.
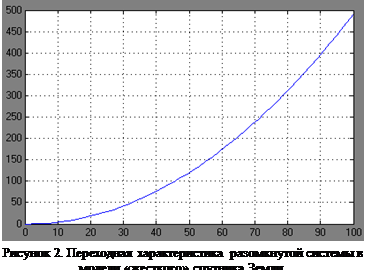
На рисунке 2 изображена переходная характеристика системы, из которой видно, что она не устойчива.
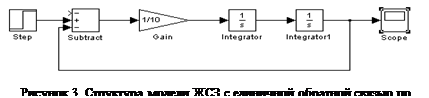
2. Охват модели ЖСЗ обратной связью по положению
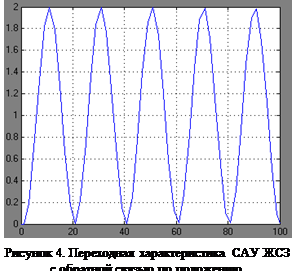
Структура модели ЖСЗ с единичной обратной связью по положению представлена на рисунке 3, ее переходная характеристика – на рисунке 4, вид которой соответствует консервативному звену. Такая САУ находится на границе устойчивости и неспособна привести объект в конечное положение.
3. Охват модели ЖСЗ обратной связью по скорости и по положению