Учебное пособие: Системы автоматического управления
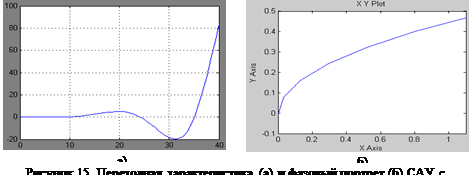
Очевидно, что запас устойчивости уменьшается и ухудшаются показатели регулирования САУ со звеном запаздывания, вплоть до полной неустойчивости системы при увеличении времени запаздывания (рис. 15).
Выводы
Исследование модели ЖСЗ показало, что САУ ЖСЗ является неустойчивой в разомкнутом состоянии. В ведение единичной обратной связи по положению переводит систему на колебательную границу устойчивости и конечное угловое положение объекта управления не определено. Система становится устойчивой и управляемой при введении местной обратной связи по угловой скорости. Такая система обладает приемлемыми показателями качества регулирования и способна отрабатывать задания на угловые перемещения. Введение дополнительного регулятора в канал местной обратной связи позволяет управлять демпфированием системы, что было показано. САУ с чистым запаздыванием может быть как устойчивой с приемлемыми показателями качества регулирования, так и неустойчивой. Увеличение времени запаздывания ведет к усилению колебательных свойств системы и переходу ее в неустойчивое состояние.