Учебное пособие: Сопротивление материалов
Отнесем недеформированное тело к декартовой системе координат Oxyz (рис. 2). Положение некоторой точки М в этой системе координат определяется радиус-вектором r(х, у, z) . В деформированном состоянии точка М займет новое положение М' , характеризуемое радиус-вектором r' (х, у, z) . Вектор u=r'-r называется вектором перемещений точки М . Проекции вектора u на координатные оси определяют компоненты вектора перемещений u(х, у, z), v(х, у, z), w(х, у, z) , равные разности декартовых координат точки тела после и до деформации.
Перемещение, при котором взаимное расположение точек тела не меняется, не сопровождается деформациями. В этом случае говорят, что тело перемещается как жесткое целое (линейное перемещение в пространстве или поворот относительно некоторой точки). С другой стороны, деформация, связанная с изменением формы тела и его объема, невозможна без перемещения его точек.
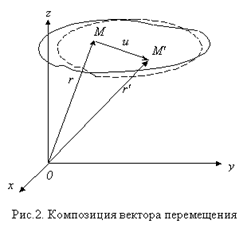
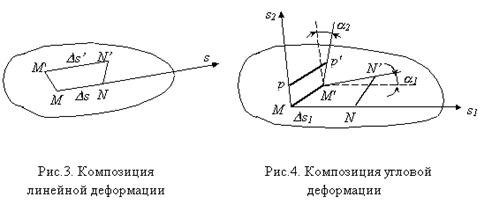
Деформации тела характеризуются изменением взаимного расположения точек тела до и после деформации. Рассмотрим, например, точку М и близкую к ней точку N , расстояние между которыми в недеформированном состоянии вдоль направления вектора s обозначим через s (рис. 2). В деформированном состоянии точки М и N переместятся в новое положение (точки М' и N' ), расстояние между которыми обозначим через s' . Предел отношения
![]()
называется относительной линейной деформацией в точке М в направлении вектора s . Рассматривая три взаимно перпендикулярных направления, например, вдоль координатных осей Ох, Оу и Oz , получим три компоненты относительных линейных деформаций ex, ey, ez , характеризующих изменение объема тела в процессе деформации.
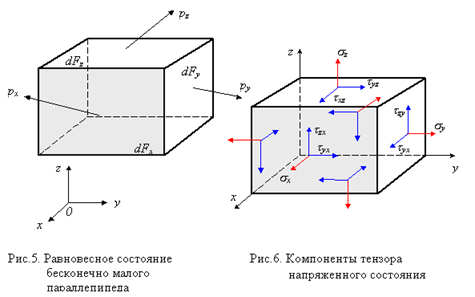
Для описания деформаций, связанных с изменением формы тела, рассмотрим точку М и две близкие к ней точки N и Р , расположенные в недеформированном состоянии в направлении двух взаимно ортогональных векторов s1 и s2 . Расстояния между точками обозначим через s1 и s2 (рис. 4). В деформированном состоянии положение точек обозначим через М', N' и Р' . Угол между отрезками M'N' и М'Р' в общем случае будет отличным от прямого. При s1 0, s2 0 изменение угла 12 между двумя ортогональными до деформации направлениями называется угловой деформацией . Как видно из рис. 4, угловая деформация складывается из двух углов 1 и 2 , связанных с поворотами отрезков M'N' и М'Р' в плоскости, образованной векторами s1 и s2 , относительно этих векторов. Если заданы три взаимно ортогональных вектора, направленных вдоль координатных осей, то имеются три угловые деформации xy , xz и yz , которые вместе с тремя линейными деформациями ex, ey и ez полностью определяют деформированное состояние в точке.
Напряженное состояние в точке. Тензор напряжений
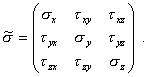
Вектор напряжений pn является физическим объектом, имеющим длину, направление и точку приложения. В этом смысле он обладает векторными свойствами. Однако этому объекту присущи некоторые свойства, не характерные для векторов. В частности, величина и направление вектора напряжений зависят от ориентации вектора n нормали бесконечно малого элемента поверхности dF . Совокупность всех возможных пар векторов n , рn в точке определяет напряженное состояние в данной точке. Однако для полного описания напряженного состояния в точке нет необходимости задавать бесконечное множество направлений вектора n , достаточно определить векторы напряжений на трех взаимно перпендикулярных элементарных площадках. Напряжения на произвольно ориентированных площадках могут быть выражены через эти три вектора напряжений. В дальнейшем лектор умышленно меняет ориентацию координат. Так, что ось Z - продольная ось бруса, а X и Y - координаты любой точки его поперечного сечения. Проведем через точку М три взаимно перпендикулярных плоскости с векторами нормалей, направления которых совпадают с направлениями координатных осей. Элементарные площадки образуем дополнительными сечениями, параллельными исходным плоскостям и отстоящими от них на бесконечно малые расстояния dx, dy, dz . В результате в окрестности точки М получим бесконечно малый параллелепипед, поверхность которого образована элементарными площадками dFх =dydz , dFн =dxdz , dFя =dxdy . Векторы напряжений px, py, pz , действующие на элементарных площадках, показаны на рис. 5.
Разложим каждый вектор напряжений на составляющие вдоль координатных осей (рис. 6). На каждой площадке действует одно нормальное напряжение x , y , z , где индекс обозначает направление вектора нормали к площадке и два касательных напряжения с двумя индексами, из которых первый указывает направление действия компоненты напряжения, второй-направление вектора нормали к площадке.
Совокупность девяти компонент напряжений (по три на каждой из трех взаимно перпендикулярных площадок) представляет собой некоторый физический объект, называемый тензором напряжений в точке. Тензор можно представить в виде матрицы, соответствующим образом упорядочив девять компонент:
Для компонент тензора напряжений общепринятым является следующее правило знаков: компонента считается положительной, если на площадке с положительной внешней нормалью (т. е. направленной вдоль одной из координатных осей) эта компонента направлена в сторону положительного направления соответствующей оси. На рис. 6 все компоненты тензора напряжений изображены положительными. На площадках с отрицательной внешней нормалью (грани параллелепипеда, не видимые на рис. 5 и 6) положительная компонента направлена в противоположном направлении. Напряжения на трех взаимно ортогональных площадках с отрицательными направлениями нормалей также характеризуют напряженное состояние в точке. Эти напряжения, являющиеся компонентами тензора напряжений , определяются аналогично напряжениям на площадках с положительной нормалью. Они обозначаются теми же символами и имеют положительное направление, обратное изображенному на рис. 6.
6. Свойства тензора напряжений. Главные напряжения
Ключевые слова : шаровый тензор напряжений, инвариантность, характеристическое уравнение, девиатор.
Тензор напряжений обладает свойством симметрии. Для доказательства этого свойства рассмотрим приведенный в лекции 5 элементарный параллелепипед с действующими на его площадках компонентами тензора напряжений. Так как тело находится в равновесии, следовательно, находится в равновесии любая его часть, в том числе и элементарный объем. Запишем одно из шести уравнений равновесия этого объема, а имен но - сумму моментов всех сил относительно оси Ох . Все силы, кроме двух, либо не создают момента относительно ocи Ох , либо взаимно уничтожаются. Отличные от нуля моменты создают компоненты yz (верхняя грань) и zy (правая грань):
![]()
После сокращения на элемент объема dV =dxdydz получим
![]()
Аналогично, приравнивая нулю сумму моментов всех сил относительно осей Оу и Оz , получим еще два соотношения
![]()
Эти условия симметрии и тензора напряжений называются также условиями парности касательных напряжений : касательные напряжения, действующие по двум взаимно перпендикулярным площадкам в направлениях, ортогональных ребру, образованному пересечением этих площадок, равны по величине. С учетом этих свойств из девяти компонент тензора напряжений независимыми оказываются шесть компонент.
Покажем теперь, что компоненты тензора напряжений определенные для трех взаимно перпендикулярных площадок, полностью характеризуют напряженное состояние в точке, т. е. позволяют вычис?