Дипломная работа: Дослідження сервоприводу з урахуванням нелінійності
Міністерство освіти і науки України
ДИПЛОМНА РОБОТА
Дослідження сервоприводу з урахуванням нелінійності
2007 р
Вступ
Упровадження нової техніки в соціалістичне народне господарство базуєтьсяна всі зростаючі механізації і автоматизації процесів управліннямашинами і апаратами. Особливо велике вживання автоматизація знаходить в сучасній авіаційній і ракетній техніці.
Запуск Радянським Союзом перших штучних супутників Землі космічних ракет, перші в світі польоти навкруги Землі на космічному кораблі радянських космонавтів Ю.А. Гагарина і Г.С. Титова показали блискучі успіхи в розвитку вітчизняної ракетної техніки, автоматики і систем управління. Системи автоматичного управління літальними апаратамипо пристрою представляють складну комбінацію гіроскопічних, електронних, електромеханічних, газових і гідравлічних агрегатів і приводів. Гідравлічні приводи в цих системах частіше за все виконують одночасно функції підсилювачів потужності і виконавчих механізмів. За допомогою гідравлічних приводів можна досягти посилення сигналів управління по потужності в декілька тисяч раз і одержати зусилля, що розташовуються, на органах управління (кермі, площинах та ін.) в декілька тонн.
Гідравлічним приводом називають систему агрегатів і машин, що служитьдля передачі механічноїенергії за допомогою рідини.
Основними елементами гідравлічного приводу є перетворювачіенергії – насоси і гідродвигуни.
Насосом називають гідравлічну машину, що перетворює механічнуенергію приводного двигуна в енергію потоку рідини. Гідродвигуномназивають машину, що перетворює енергію рідини в механічнуенергію.
Гідравлічним приводом називають об'ємним (на відміну від гідродинамічного), якщо він складається з насосів і гідродвигунів об'ємного типу. Як механізми регулювання швидкості в гідроприводах стежачих систем, застосовують дросельні (золотникові) механізми і насосизмінної продуктивності.
1. Стан проблеми і постановка задач проектування
Нелінійності є в будь-якому реальному приводі, можуть істотновпливати на його динамічні властивості, зокрема на стійкість.
Цей вплив виявляється в наступному: привод, стійкий і має достатній запас стійкості в лінійному наближенні, може виявитися не стійким або не володіючим тим запасом стійкості, який очікується. Такий вплив надають частіше за все «петлеві нелінійності (люфт, гістерезис), алепри деяких положеннях в структурі приводу до цього ж ефекту можутьпривести і однозначні нелінійності, наприклад навіть такі, як зона нечутливості[1].
В приводі можуть з'явитися принципово нові типи руху, які не можуть існувати в лінійних системах і тому не можуть бути навітьякісно пояснені з позиції лінійної моделі. До таких рухів відносяться в першу чергу автоколивання. Автоколивання можуть викликати ті ж нелінійності, які викликають зменшення запасу стійкості. В одноконтурнихсистемах – це петлеві нелінійності, в неодноконтурних – однозначні.
Допустимі або недопустимі автоколивання в реальній системі – питання дискусійне. Все залежить від їх параметрів, тобто від розмаху і частоти. Одне поза сумнівом, автоколивання не повинні порушувати вимоги по точності, отже, якщо їх і можна допустити, то тільки при таких, амплітудах, при яких викликана ними помилка сумісно з вимушеною помилкою, викликаноювідтворенням всіх заданих законівуправління, не виходить за межі допустимих.
Для достатньо повної думки про динамічні властивості проектованогоприводу і його придатності для виконання доручених йому функцій потрібно розглянути і його. нелінійну модель. При цьому розглядіперед інженером виникають дві основні задачі: по-перше, зрозуміти, в чому може виявлятися вплив тієї або іншої нелінійності, зрозуміти фізику дії як окремої нелінійності, так і сукупності декількохнелінейностей і, по-друге, оцінити, кількісний вплив головних нелінейностей на стійкістьі динамічну точність досліджуваної системи.
З огляду на те, що на нелінійну систему принцип суперпозиції не розповсюджується, строго кажучи, не можна розглядативплив кожної нелінійності окремо і потім підсумовуватиефекти їх дії. Тому, здавалося б, потрібно розглядати вплив всіх нелінійностей спільно. Такийпідхід пов'язаний із значними обчислювальними труднощами, які, правда, можуть бути подолані при використовуваннісучасних обчислювальних машин. Важливеінше, такий підхід не має сенсу, в усякому разі, на першому етапі проектування нелінійної системи, оскільки не дає корисноїінформації про вплив кожної з нелінейностей на динамічні властивості, а отже, не може допомогти увиборі методів цілеспрямованої дії з метою забезпеченнянеобхідних динамічних властивостей.
Частіше всього характер впливу нелінійності не змінюється при її діїв сукупності з іншими, тому має сенс розгляд і окремовзятих нелінейностей, і розумно вибраних комбінацій невеликого числа нелінейностей.
Розуміння впливу нелінейностей на динамічні властивості важливеі для правильного проектування лінійного варіанту– вибору структури, методівкорекції і т. п., оскільки системи, еквівалентні по динамічних властивостяхв лінійному плані, можуть виявитися зовсім не еквівалентнимипри обліку нелінейностей і при синтезі лінійної структури раціонально використовуватитакі, у яких шкідливий вплив основних нелінейностей на динамічнівластивості менше.
На нашу думку, найзручнішим математичним апаратом для досліджування сервоприводу (СП), в даній роботі досліджується елекрогідропривод (ЕГП) розглядається за допомогою методу гармонійної лінеаризації в інтерпретації, заснованого на використанні логарифмічнихчастотних характеристик нелінійноїсистеми, що викладаєтьсянижче [1].
1.1 Структура сервоприводу
Сервопривід – частина системи стабілізації (СС), яка призначенадля посилення командного сигналу і перетворення його електричної енергії в механічнепереміщення. Переміщення залежно від практичного вживанняможе бути обертальним або поступальним. Таким чином, елекрогідропривод євиконавчим органом СС, що впливає на кермо виробу. Функціональнасхема сервоприводу представлена на малюнку 1.1.
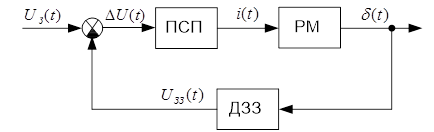
Малюнок 1.1 – Функціональна схема досліджуваної системи сервоприводу
Ця схема застосовується частіше всього на вітчизняних виробах.
ПСП – підсилювач сервоприводу;
РМ – рульова машинка (іноді рульовий агрегат для СС);
ДЗЗ – датчик зворотного зв'язку;
![]() – струм управління рульової машинки;
– струм управління рульової машинки;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--