Контрольная работа: Кинематическое исследование кривошипно-балансирного механизма
В крайнем правом положении ползун В будет находиться на наибольшем расстоянии от шарнира О . Это положение будет тогда, когда кривошип ОА и шатун АВ расположатся по одной прямой один за другим. Для нахождения этого положения необходимо из центра шарнира О радиусом равным (ОА + АВ ) = 100+400=500 сделать засечку на траектории движения точки В .
В крайнем левом положении точка В должна находиться на наименьшем расстоянии от шарнира О . Это положение будет тогда, когда кривошип ОА и шатун АВ расположатся по одной прямой. Для нахождения этого положения необходимо из центра шарнира О радиусом, равным (АВ - ОА ) =400-100=300 сделать засечку на траектории движения точки В .
Крайние положения точки В определяют ход ползуна кривошипно-шатунного механизма.
Имея 6÷8÷12 положений звеньев механизма, можно построить траектории положения любой точки любого звена, например центра тяжести S шатуна АВ . Положение точки S определяем делая засечки на прямых А 1 В 1 , А 2 В 2 , …, А 8 , В 8 дугами радиуса А S из точек А 1 , А 2 , А 3 , …, А 8 . Соединив последовательно полученные точки S 0 , S 1 , S 2 ,..., S 8 плавной кривой, получим траекторию точки S за один оборот кривошипа.
Построение положения звеньев кривошипно-балансирного механизма и определение положений характерных точек выполняется аналогично КШМ, рассмотренному выше. По заданным координатам определить на чертеже положение неподвижных точек ОО 1 . Затем провести окружность радиуса ОА и отметить на них восемь положений (А 1 , А 2 ,…, А 8 ) точки А ведущего звена, для которых требуется определить положение всех звеньев механизма. Положения остальных звеньев механизма, соответствующие заданным положениям ведущего звена ОА , определяем методом засечек.
Точка В движется по дуге окружности радиуса ВО 1 и всегда находится на этой дуге. Положение точек В 1 , В 2 , …, В 8 , соответствующие заданным положениям звена ОА 1 , ОА 2 , …, ОА 8 получим на пересечении дуги с дугой окружности радиуса АВ , описанной из точек А 1 , А 2 , …, А 8 . Соединив точки В 1 , В 2 , …, В 8 с точками А 1 , А 2 , …, А 8 и О 1 получим положение звеньев АВ и ВО 1 (рис. 2).
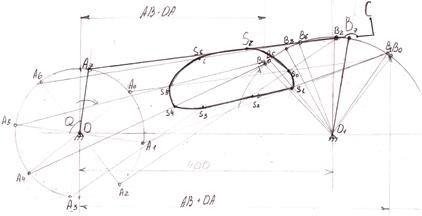
Рис. 2
Построение кинематических диаграмм
Кинематической диаграммой называется кривая в прямоугольной системе координат, представляющая зависимость какого-либо параметра движения звена от времени или угла поворота ведущего звена.
Выражение зависимости параметров движения звеньев в виде графиков дает возможность наглядно представить их изменение за определенный промежуток времени.
Построим кинематическую диаграмму перемещения, изменения скорости и ускорения точки В кривошипно-балансирного механизма.
Для построения необходимо:
1. Выбрать произвольную прямоугольную систему координат s /t .
2. На оси абсцисс отложить время t одного оборота кривошипа ОА и разделить полученный отрезок на 6÷8÷12 равных частей.
3. Из каждой точки деления оси абсцисс в направлении оси ординат отложить перемещение точки В , которые определяем из рис.1 за соответствующий промежуток времени (угла поворота кривошипа ОА ). За начало отсчета перемещения точки В принимаем одно из крайних положений В 0 , В 4 .
4. Соединить плавной кривой полученные точки.
Это и будет диаграмма перемещения ползуна (приложение2).
Для построения диаграммы скорости точки В необходимо продифференцировать закон S = f (t ). Строится диаграмма методом графического дифференцирования диаграммы перемещения точки В .
Для этого необходимо:
1. Выбрать прямоугольную систему координат v /t .
2. По оси абсцисс отложить в том же масштабе время t одного оборота кривошипа ОА.
3. На отрицательной части оси абсцисс выбрать точку Р в качестве полюса диаграммы скорости. Расстояние РО выбирается произвольно, учитывая, что величина отрезка РО влияет на высоту диаграммы скорости - чем больше РО , тем выше диаграмма.
4. Провести касательные к соответствующим точкам диаграммы перемещения (1', 2', 3', …, 8').
5. Через полюс Р провести прямые, параллельные касательным диаграммы перемещения до пересечения с осью ординат. Точки пересечения с осью параллельно перенести на ординаты соответствующих точек деления оси абсцисс.
6. Соединить плавной кривой полученные точки.
Имея диаграмму скоростей v /t , аналогично строим диаграмму тангенциальных ускорений, представленную в приложение 2.
Построение планов скоростей и ускорений кривошипно-балансирного механизма
На рис.3 представлена кинематическая схема механизма. Требуется построить планы скоростей и ускорений в заданном его положении, если известны размеры звеньев и значение угловой скорости ведущего звена.
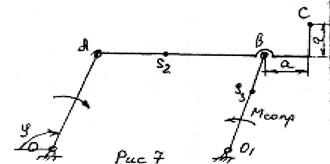
Рис. 3