Контрольная работа: Кинематическое исследование кривошипно-балансирного механизма
Государственное образовательное учреждение высшего профессионального образования
Контрольная работа по курсу
Теория машин и механизмов
Кинематическое исследование кривошипно-балансирного механизма
2009 год
Содержание
Кинематическое исследование кривошипно-балансирного механизма
Построение кинематических диаграмм
Построение планов скоростей и ускорений кривошипно-балансирного механизма
Кинетостатический анализ механизма
Задание
1. Построить в выбранном масштабе согласно своему варианту схему механизма для восьми положений кривошипа. Начальное положение ведущего звена (кривошипа ОА ) определяется углом J 0 . Все последующие положения звена ОА определяются через 45º от первоначального.
2. Построить траектории точек S и С 2 .
3. Построить диаграмму перемещения точки В .
4. Методом графического дифференцирования построить диаграммы изменения скорости и ускорения точки В .
5. Построить планы скоростей и ускорений для восьми заданных положений механизма и определить значения скорости и ускорений характерных точек.
6. Для одного из положений механизма определить силы давления в кинематических парах, учитывая силы инерции звеньев, веса, момента инерции звеньев относительно осей, проходящих через их центры тяжести, полезные сопротивления, приложенные к ведомому звену. Силы полезного сопротивления Р сопр и моменты полезного сопротивления М сопр следует направить против движения ведомого звена.
7. Пользуясь найденным давлением в шарнире А , подсчитать уравновешивающий момент на ведущем кривошипе ОА и затем для проверки определить этот же момент методом рычага Жуковского.
Данные для построения:
| Вариант | Схема механизма | Размеры звеньев в мм | Q | φ | n ,об. /мин ведущего звена | |||||
| ОА | АВ | ВО 1 | AS 2 | BS 3 | OO 1 | |||||
| 7 в | Рис.7 | 100 | 400 | 150 | 250 | 60 | 400 | 100 | 10 | 920 |
| Вариант | Вес звеньев, Н | Моменты инерции относительно осей, проходящих через центры массы звеньев 2 и 3, кг∙м2 | Сила сопротив-ления, Н |
Момент сопротив-ления, Н *м | ||
| Звено 2 | Звено 3 | Звено 2 | Звено 3 | Р сопр | М сопр | |
| G 2 | G 3 | JS 2 | JS 3 | |||
| 7 (а, б, в, г, д, е) | 50 | 30 | 0,06 | 0,02 | - | 400 |
Кинематическое исследование кривошипно-балансирного механизма
Начертим в выбранном масштабе 1: 4 кинематическую схему механизма (рис. 1).
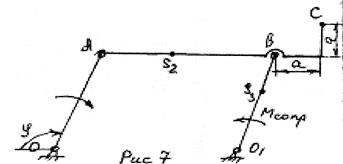
Рис. 1
Для построения плана положений звеньев необходимо:
1. Построить траекторию центра шарнира А , ведущего звена, для этого проводим окружность радиуса ОА .
2. Отметить на траектории движения точки А 6÷8÷12 и т.д. положений шарнира А .
3. Построить траекторию движения точки В ползуна, совершающего возвратно-поступательное движение.
4. Найти на траектории движения точки В 6÷8÷12 и т.д. положений ползуна, соответствующих отмеченным положениям шарнира А . Для этого необходимо взять раствор циркуля, равный длине шатуна АВ , и сделать из каждого положения точки А засечки на траектории движения точки В . Полученные точки А и В в соответствии соединить прямыми.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--