Контрольная работа: Синтез системы радиального перемещения каретки
После введения КУ проверяется путем моделирования выполнение требований по точности и качеству переходного процесса.
Проверяем систему на устойчивость и определяем ее реакцию на синусоидальное воздействие:
![]() ;
;
![]() ;
;
![]() ,
,
т.о. ![]() .
.

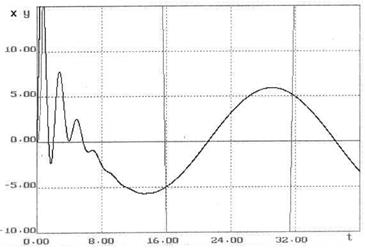
Рис.10.(лист 4)
Т.к. не достигается требуемая ошибка Xmax = 10 мкм, увеличиваем общий коэффициент усиления системы до k = 20. При таком коэффициенте достигается требуемая точность, запас устойчивости по фазе и по амплитуде достаточен для реализации САР.
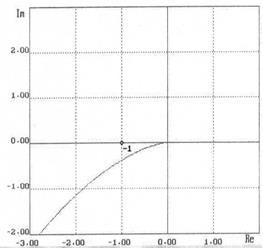
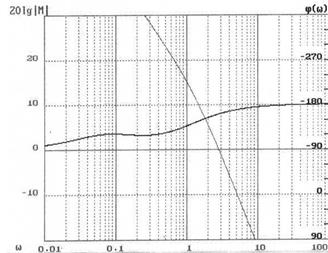
Рис.11.(лист 5)
Литература
1. Сапаров В.Е., Максимов Н.А. Системы стандартов в электросвязи и радиоэлектронике. М.: Радио и связь, 1985. 248 с.
2. Микропроцессорные системы автоматического управления./Под ред. Бесекерского В.А. Л., Машиностроение, 1988.
3. Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. М., Наука, 1987.
4. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М., Наука, 1975.
5. Теория автоматического управления./Под ред. Воронова А.А. М., Высшая школа, 1986, Т.1, 2.
6. Основы автоматического регулирования и управления./Под ред. Пономарева В.М., Литвинова А.П. М., Высшая школа, 1974.
7. Сборник задач по теории автоматического регулирования и управления./Под ред. Бесекерского В.А. М., Высшая школа, 1978.