Курсовая работа: Анализ системы автоматического регулирования разрежения в топке
Тдв * ( d2 φдв/ dt2 ) + (d2 φдв/ dt) = кдв * Uy ;
Тдв * р2 * φдв (р) + р * φдв (р) = кдв * Uy (р);
Wy (р) = φдв (р) / Uy (р) = кдв/ р * ( Тдв * Р + 1);
где Uy , В - напряжение управления.
φдв град. - угол поворота выходного вала двигателя.
7) Регулирующий орган дымососа (3) - заслонки.
Qд = кв * φр;
Qд (р) = кв * φр (р);
φр - угол порота дроссельных заслонок
Qд , м3 /с - производительность дымососа.
8) Редуктор (р).
φр = кр * φдв;
φр (р) = кр * φдв (р);
Wр = φр (р) / φдв (р) = кр ;
где φр, φдв - входной и выходной углы поворота.
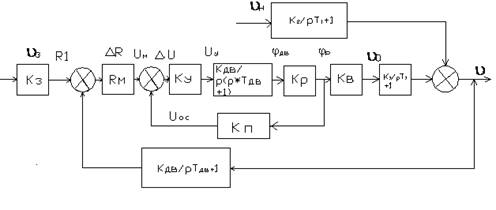
Задатчик (з) системы является безинерциальным. Его коэффициент передачи должен быть равен коэффициенту передачи кд датчика. Поскольку заданное Рз и Рд - действительные разряжения должны вычитаться в одном масштабе. Поэтому кд = кз можно перенести за систему управления СУ и
считать, что из данного разрежения Рт непосредственно вычитают Рд и формируют сигнал ошибки "е". Преобразованная таким образом структурная схема САР разряжения в топке котла показана на рис.4.
3. Определение закона регулирования системы
Для определения закона регулирования рассматриваемой системы автоматического регулирования разрежения в топке котла найдем передаточную функцию, определяющую взаимосвязь Qв на объект и ошибки "е":
![]()

Подставим в найденное выражение численное значение коэффициентов и получим:

При последовательном соединении звеньев их передаточные функции перемножаются, поэтому:
![]()
Окончательно для безинерциального регулятора получаем:
![]()
Зависимость управляющего воздействия Qв от ошибки "е" показывает, что в рассматриваемой системе применён пропорциональный закон регулирования.
4. Определение передаточных функций системы по управляющему воздействиям и для ошибок по этим воздействиям
Передаточная функция системы автоматического регулирования по управляющему воздействию.