Курсовая работа: Автоматизация вельц печи для переработки цинковых кеков
где Коб – коэффициент передачи объекта,
Тоб – постоянная времени (Тоб = 18 – 4 = 14 мин),
τоб – время запаздывания, (τоб = 4 мин),
S – переменная Лапласа.
2 Определение передаточной функции методом площадей
Передаточная функция второго порядка может быть представлена в следующем виде
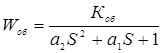
Коэффициенты а1 и а2 вычисляются по формулам
а1 = F1 = Δt {∑ [1-Δyб (Δt. i)] – 0,5},

где n – количество интервалов разбиения кривой разгона (n=19),
Δt – интервал разбиения (Δt = Мt = 2,4 мин),
Δyб (t. i) – значение безразмерной кривой разгона в i-й момент времени.
Тогда
а1 = F1 = 2,4{ (1-0) + (1 – 0,1) + (1 – 0,07) + (1 – 0,25)+(1 – 0,43)+(1 – 0,58) + (1 – 0,7) + (1 – 0,78) + (1 – 0,84) + (1 – 0,88) + (1 – 0,91) + (1 – 0,94)
+ (1 – 0,96) + (1 – 0,97) + (1 – 0,98) + (1 – 0,985) + (1 – 0,99) – 0,5 }=
= 2,4 . 5,225 = 12,54 мин
![]()
![]()
![]()


![]() мин 2
мин 2
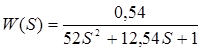
Передаточная функция второго порядка будет иметь вид
Определение передаточной функции методом площадей является более сложным по сравнению с определением по кривой разгона. Однако передаточная функция второго порядка имеет более точное представление.
3 Вычисление настроек регуляторов и исследование статических свойств системы регулирования
Автоматическое устройство, обеспечивающее поддержание выходных величин объекта вблизи требуемых значений, называют автоматическим регулятором.
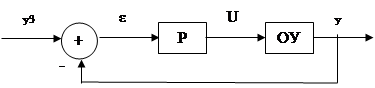
Регулятор реализует закон регулирования. Структурная схема системы регулирования представлена на рисунке 2.
 |
|
Рисунок 2 – Структурная схема системы регулирования