Курсовая работа: Автоматизування змішувальної установки на основі одноконтурних систем регулювання
Або
![]()
![]() ,
,
де ![]() ;
; ![]() .
.
Розрахуємо перехідний процес методом квадратур.
Знайдемо доповнюючий поліном для ДЧХ

Знайдемо відношення
Знаходимо рівняння для дійсної частотної характеристики

За останнім рівнянням розраховуємо ДЧХ і знаходимо частоту переходу ![]() . Графік ДЧХ показаний на рис. 6. З графіка видно, що частота переходу
. Графік ДЧХ показаний на рис. 6. З графіка видно, що частота переходу ![]() .
.
Підставивши частоту ![]() в рівняння
в рівняння

знаходимо постійну часу ![]() .
.
Уявна частотна характеристика має вигляд
![]() ,
,
звідки ![]()
або
 .
.
З останнього рівняння при ![]() отримуємо:
отримуємо: ![]() .
.
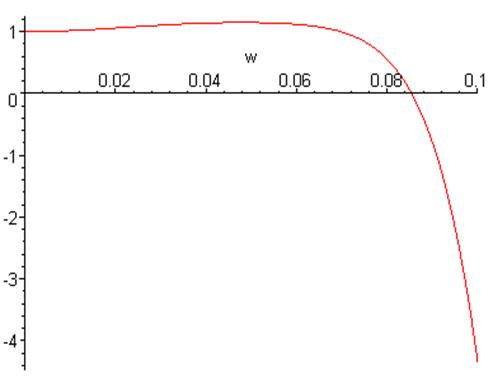
Рис. 6. ДЧХ еквівалентного об'єкта керування.
Таким чином, ідентифіковане характеристичне рівняння еквівалентного об'єкта керування має вигляд: ![]() , а диференціальне рівняння -
, а диференціальне рівняння - ![]() Знайдемо відношення постійних часу еквівалентного об'єкта керування:
Знайдемо відношення постійних часу еквівалентного об'єкта керування: ![]() . Так як відношення постійних часу менше 2, то робимо висновок, що перехідний процес еквівалентного об'єкта керування матиме коливальний характер. Тому розрахунок перехідного процесу виконаємо за формулою
. Так як відношення постійних часу менше 2, то робимо висновок, що перехідний процес еквівалентного об'єкта керування матиме коливальний характер. Тому розрахунок перехідного процесу виконаємо за формулою
 .
.
Знайдемо ступінь загасання перехідного процесу об'єкта: ![]() , а власну частоту коливань за формулою
, а власну частоту коливань за формулою
 .
.
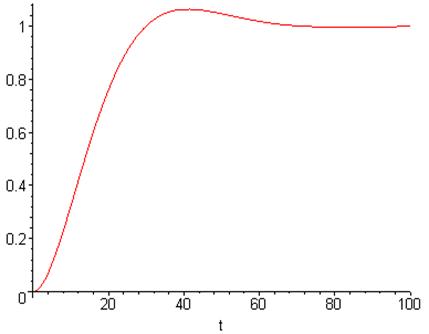
Рис. 7. Графік перехідного процесу еквівалентного об'єкта керування