Курсовая работа: Электропривод механизма выдвижения руки манипулятора
31. Установите параметр «Состояние контура положения» в значение «Замкнут».
32. Установить минимальное значение pp1.
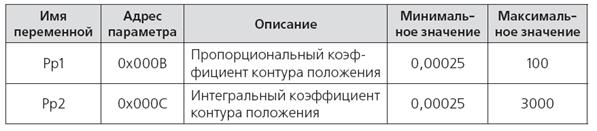
Значения по умолчанию: 5; 0.
Описание: коэффициенты ПИ регулятора контура положения.

Значение по умолчанию: 500.
Описание: предусмотрено несколько частот дискретизации, из которых пользователь может выбрать требуемую частоту дискретизации в зависимости от стоящей перед ним задачи.
33. Перейти к вкладке «Параметры тестирования».
34. Установить параметр Tp1 в «Ступенька».
35. Настроить параметры tp2, tp3, tp5.
36. Перейти в окно осциллографа.
37. Выбрать каналы тестирования (не более трех). При этом не допускается установка одновременно двух параметров «Заданное положение», «Текущее положение». Пример выбранных параметров: текущее положение, текущая скорость вращения, заданная скорость вращения.
38. Выполнить запуск теста и дождаться отображения графиков на экране.
39. Проанализируйте качество переходного процесса, при необходимости настроив смещение и множители.
40. При необходимости скорректируйте параметры pp1, pp2, pp3 и повторите эксперимент.
41. Перейти к вкладке «Статические параметры/Интерфейс».
42. Установите параметр «Источник опорного сигнала» в требуемое значение.

Значение по умолчанию: Интерфейс USB.
Описание: определяет интерфейс, по которому выполняется управление приводом.
Список возможных интерфейсов:
• 0: интерфейс USB;
• 2: интерфейс StepDir;
• 4: аналоговый интерфейс;
• 5: интерфейс CAN;
• 6: квадратурный интерфейс.
43. При выборе интерфейса Step/Dir выполните настройку параметра ip1.
44. При выборе аналогового интерфейса выполните настройку параметров ip1,ip6, ip12.