Курсовая работа: Электропривод механизма выдвижения руки манипулятора
Регулятор скорости представляет собой П-регулятор.
Контур положения:
Настроим контур положения на технический оптимум:

Регулятор положения представляет собой П-регулятор.
В соответствии с техническим заданием моделируемая система должна отрабатывать гармоническое задание с частотой 0…2 Гц с ошибкой позиционирования не более 1 мм
При f=1 Гц Ω = 2·π·f = 2·3,14·1=6,28 рад/с
Амплитуду задания выбираем опытным путём, для получения линейной скорости движения руки манипулятора не более 0,5 м/с. Была выбрана амплитуда, равная 24,5 рад.

Рис.4 Модель исследуемой системы в среде MatLab.
Результаты моделирования:

Рис.5. Зависимость ![]() и
и ![]() от времени t.
от времени t.

Рис.6. Зависимость угловой скорости ω электродвигателя от времени t.

Рис.7. Зависимость момента М электродвигателя от времени t.
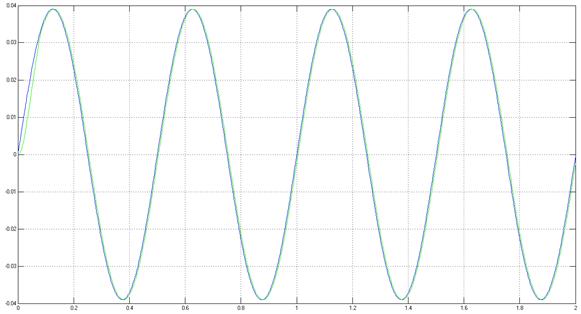
Рис.8 Зависимость линейного перемещения L руки манипулятора от времени t.
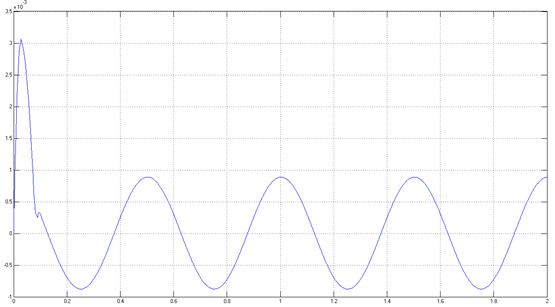
Рис.9 Зависимость ошибки позиционирования от времени.
Таким образом, из результатов моделирования видно, что при отработке гармонического задания с частотой 2 Гц ошибка слежения ∆L=0,88 мм < 1 мм, что соответствует заданным требованиям.
5. Разработка электрической схемы
Согласно принципиальной электрической схеме в состав электропривода выдвижения руки манипулятора входят:
- интегрированные сервопривод СПШ20-23017;
- переключатель TR26-21C-11D1 (220В, 16А);
- разработанный блок питания.
Блок питания служит для обеспечения интегрированного сервопривода СПШ20-23017 стабилизированным силовым напряжением 80 В и стабилизированным напряжением цепи управления 15В. В его состав входят два преобразователя постоянного фирмы «Александер-Электрик»: DC/DC преобразователь МДМ10-Вт с выходным напряжение 15 В и DC/DC преобразователь MR100 с выходным напряжением 80 В. Также источник питания снащён ключом сброса энергии.
В режиме собственно двигателя, когда мощность источника питания расходуется на создание вращательного момента и в генераторном режиме, когда внешний вращательный момент наводит ЭДС на статорные обмотки и привод превращается в генератор постоянного тока. Переход в генераторный режим происходит всякий раз, когда контроллер сервопривода включает торможение, а инерция ротора и нагрузки заставляет его вращаться дальше. В результате чего накопительные конденсаторы начинают запасать электроэнергию. Кроме повышения КПД, наличие обратного тока направленного от привода в накопительные конденсаторы даёт возможность осуществлять торможение без рассеивания дополнительного тепла в обмотках и «тормозных» резисторах. Блок питания модели комплектуется тремя накопительными конденсаторами суммарной ёмкостью 3000 мкФ на 160 Вольт с максимальным током пульсаций 7.5 Ампер. Ресурс конденсаторов составляет 2000 часов при температуре 105°С.
В задачах требующих резких режимов торможениях сервоприводов и/или в условиях инерционной нагрузки возникают излишки энергии, которые могут превышать возможности накопительных конденсаторов, Для таких применений в состав блока питания включены специальные мощные «тормозные» резисторы и соответствующая схема управления. С помощью этой схемы излишки энергии преобразуются в тепло, которое рассеивается в «тормозных» резисторах. Схема управления «тормозными» резисторами состоит из компаратора «ОУ» и силового ключа на полевом транзисторе. Компаратор сравнивает напряжение пропорциональное силовому (делитель R1, R2) с предустановленным при настройке стабилизированным напряжением, поступающим с потенциометра RP1. Если значение силового напряжения превышает предустановленную величину, компаратор открывает силовой ключ и часть тока заряда накопительных конденсаторов перенаправляется на четыре мощных резистора (R3..R6), облегчая, тем самым, режим работы накопительных конденсаторов.