Курсовая работа: Электропривод механизма выдвижения руки манипулятора
чем закончился переходный процесс.
22. Уменьшите значение параметра tp2, если разрешение графиков оказалось
слишком низкое.
23. При необходимости скорректируйте пропорциональный и интегральный
коэффициенты контура скорости и повторите эксперимент.
24. Установите значение vp9 в состояние «Режим плавного разгона/торможения».

Значение по умолчанию: 1.
Описание:
1. Режим плавного разгона/торможения. В данном состоянии внутренний интерполятор включен.
2. Режим с максимальной динамикой — без использования внутреннего интерполятора. В данном режиме вал двигателя выполняет разгон с максимальным ускорением. Данный режим используется, если привод работает под управлением системы управления верхнего уровня, которая реализует интерполяцию.
25. Установите требуемое значение ускорения.
26. Выполните анализ переходных процессов с новыми настройками.
27. Настройте параметр vp8 (Максимальная скорость вращения) в соответствие с максимальной рабочей нагрузкой на валу двигателя таким образом, чтобы скорость вращения вала достигала заданного значения в статическом режиме.

Значение по умолчанию: 4000 об/мин.
Описание: определяет максимальную скорость задания для замкнутого контура управления скоростью.
28.Настройте параметр vp6 в соответствие с требованиями системы по безопасности.

Значение по умолчанию: 5 секунд.
Описание: время, в течение которого скорость вала двигателя должна достигнуть заданного значения. Если скорость вала не достигла заданного значения, то происходит аварийный останов привода. При этом состояние привода переводится в «Останов по перегрузке».
29. При появлении резонансов в определенных диапазонах скоростей вращения выполните настройку vp10-vp13, которые позволяют исключить два диапазона скоростей из функции плавного разгона/торможения.
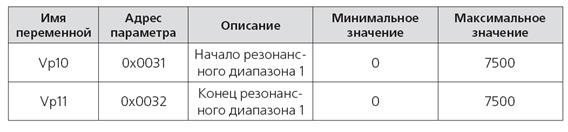
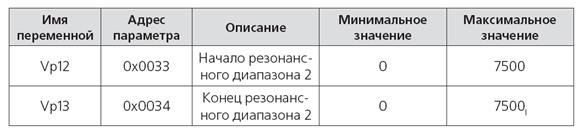
Значение по умолчанию: 0.
Описание: с помощью данных параметров можно задать 2 диапазона скоростей, которые будут исключаться из функции плавного разгона и торможения.
Если начало и конец диапазона равны, то диапазон не выбран.
Если начало диапазона меньше, чем конец, то диапазон выбран.
Настройка контура позиционирования: