Курсовая работа: Исследование динамических свойств электропривода с вентильным двигателем
В тиристорном ЭП по трехфазной мостовой схеме выпрямления переключение тиристоров при питании от сети 50 Гц происходит с угловой частотой![]() .
.
В транзисторных ЭП средняя частота переключений обычно находится в пределах![]() , при этом рабочая полоса пропускания частот в два раза ниже. При этом минимальная постоянная времени Т01 может приниматься
, при этом рабочая полоса пропускания частот в два раза ниже. При этом минимальная постоянная времени Т01 может приниматься ![]() . Если частоту коммутации увеличить, то быстродействие также возрастет [8].
. Если частоту коммутации увеличить, то быстродействие также возрастет [8].
На рис. 6.8 представлены фазные напряжения статора двигателя.
Несинусоидальность выходного напряжения приводит к несинусоидальному характеру тока в статорных обмотках и пульсациям момента двигателя. Эти пульсации особенно сильно проявляются при пониженной частоте и небольшом моменте инерции механизма, который приводится в движение приводом. Тогда они вызывают неравномерность вращения, а иногда и возникновение шагового режима, когда двигатель вращается с остановками [14].
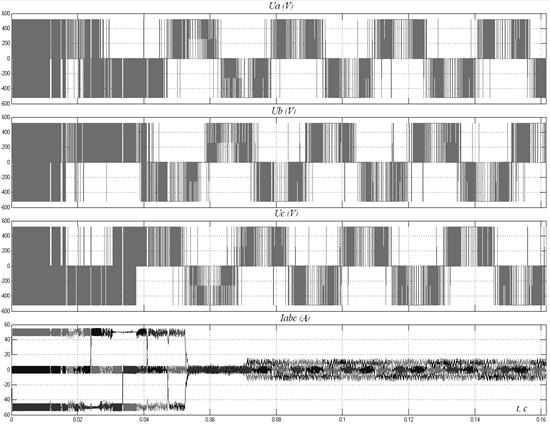
Рис. 6.8
Таким образом, несинусоидальный характер напряжения на выходе выпрямителя накладывает ограничение на возможный диапазон регулирования скорости привода. Кроме того, наличие высших гармоник в кривой тока статора вызывает увеличение потерь энергии по сравнению по сравнению со случаем питания двигателя синусоидальным напряжением.

Рис. 6.9
Также для сравнения на рис. 6.9 приведены линейные напряжения статора двигателя.
7. Анализ динамических свойств виртуальной модели вентильного двигателя
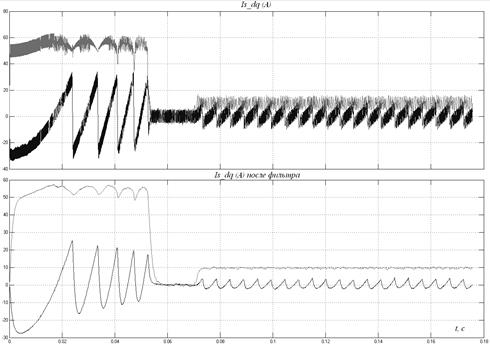
Для анализа динамических свойств виртуальной модели вентильного двигателя, кривые скорости ![]() и момента
и момента ![]() сняты на одном экране осциллографа (рис. 7.1).
сняты на одном экране осциллографа (рис. 7.1).
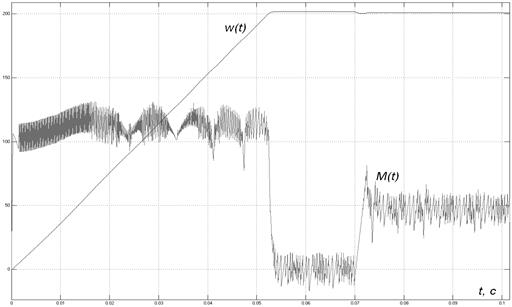
Рис. 7.1
Двигатель разгоняется при максимальном напряжении на номинальную скорость при отсутствии момента сопротивления, потом нагружается моментом, равным ![]() .
.
Из осциллограмм момента и скорости двигателя видно, что момент двигателя не постоянен, и кроме пульсаций, обусловленных работой релейных регуляторов тока, имеет еще и пульсации, аналогичные пульсациям напряжения на выходе трехфазного мостового выпрямителя. Это объясняется тем, что при постоянном токе фазы I момент синхронного двигателя в функции поворота вала ![]() изменяется по синусоиде.
изменяется по синусоиде. ![]() где
где ![]() - коэффициент пропорциональности между током и максимальным значением момента. При
- коэффициент пропорциональности между током и максимальным значением момента. При ![]() , когда ось фазы совпадает с осью q, момент максимальный. Переключение фаз происходит при
, когда ось фазы совпадает с осью q, момент максимальный. Переключение фаз происходит при ![]() и
и ![]() . При этом
. При этом ![]() . Отсюда и соответствующие этому провалы в кривой момента [1]. Такая симметричная относительно максимума форма момента говорит о том, что ДПР настроен правильно. В данной модели подстройка ДПР производится заданием начального угла
. Отсюда и соответствующие этому провалы в кривой момента [1]. Такая симметричная относительно максимума форма момента говорит о том, что ДПР настроен правильно. В данной модели подстройка ДПР производится заданием начального угла ![]() , в реальном электроприводе – поворотом корпуса ДПР относительно корпуса двигателя.
, в реальном электроприводе – поворотом корпуса ДПР относительно корпуса двигателя.
При анализе влияния параметров двигателя на качество переходных процессов следует отметить, что при увеличении числа пар полюсов ![]() уменьшается время разгона скорости до установившегося значения, т.к. увеличение
уменьшается время разгона скорости до установившегося значения, т.к. увеличение ![]() приводит к увеличению электромагнитного момента и динамического ускорения.
приводит к увеличению электромагнитного момента и динамического ускорения.
На рис. 7.2. представлена механическая характеристика РЭП на фазовой плоскости, построенная с помощью графопостроителя.
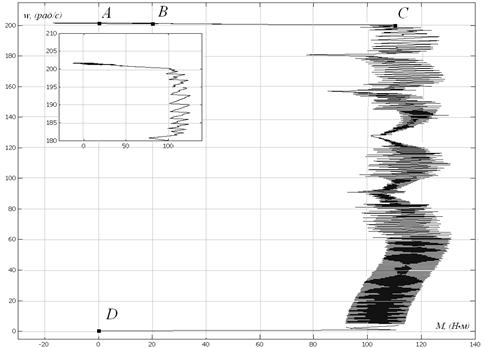
Рис. 7.2
Она получается из временных зависимостей М(t) и w(t) путем исключения из них времени t. При разгоне ЭД годограф вектора электромеханической характеристики проходит последовательно через точки D, C и достигает точки А. Характеристика наглядно показывает динамику разгона двигателя. Также видно, что скорость устанавливается без перерегулирования на уровне расчетного значения.
Чтобы показать астатический характер РЭП, т.е. абсолютную жесткость электромеханической характеристики (неизменность скорости при изменении нагрузки), система была нагружена моментом сопротивления Мс=47, Нм через 0,07с после начала разгона (рис. 7.1). Из-за появления тока, обусловленного нагрузкой, в контуре тока возникает небольшое перерегулирование, что, тем не менее, не сказывается ощутимо на просадке скорости (рис.7.2). Годограф вектора переходит из точки А в точку В.
Очевидно, что точки А, В, С лежат на одном уровне, параллельном оси абсцисс и равном расчетному значению скорости.
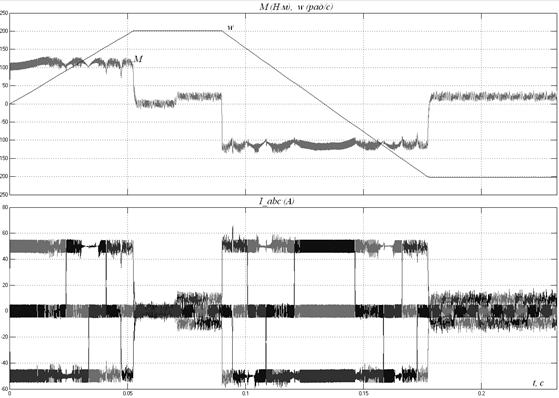
Рис. 7.3
На рис. 7.3 и рис. 7.4 приведены диаграммы реверса вентильного двигателя.
Следует отметить высокое быстродействие регулируемого привода, зависящего от настройки контура скорости. Высокие динамические свойства вентильного двигателя по сравнению ДПТ с тиристорным управлением достигаются за счет использования безынерционного контура тока. Это достигается его линеаризацией, которая проведена с помощью параллельного включения в линейную часть контура ускоряющего элемента (рис. 6.5).
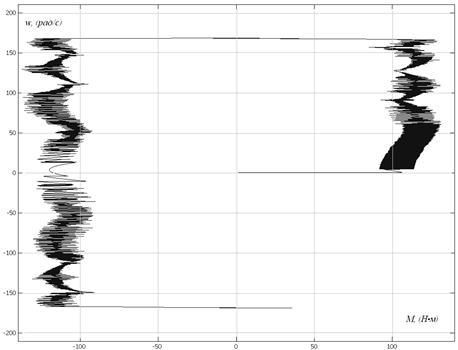
Рис. 7.4