Курсовая работа: Исследование динамических свойств электропривода с вентильным двигателем
При рассмотрении вентильной машины во вращающейся системе координат ![]() , можно заметить, что при постоянном потоке возбуждения электромагнитный момент двигателя однозначно определяется поперечной составляющей тока
, можно заметить, что при постоянном потоке возбуждения электромагнитный момент двигателя однозначно определяется поперечной составляющей тока ![]() подвижной системы координат (рис. 7.5).
подвижной системы координат (рис. 7.5).
Продольная составляющая тока ![]() не создает полезного момента, вызывает потребление реактивной энергии и с экономической точки зрения вызывает лишь дополнительные потери в виде нагрева двигателя [15]. Наличие реактивного тока связано с эквивалентной постоянной времени статорной цепи
не создает полезного момента, вызывает потребление реактивной энергии и с экономической точки зрения вызывает лишь дополнительные потери в виде нагрева двигателя [15]. Наличие реактивного тока связано с эквивалентной постоянной времени статорной цепи ![]() и перекрестными связями между продольной и поперечной осями двигателя.
и перекрестными связями между продольной и поперечной осями двигателя.
В действительности она больше нуля всегда, что вызывает появление тока ![]() . Устранения потерь добиваются включением в контур реактивного тока
. Устранения потерь добиваются включением в контур реактивного тока ![]() дополнительного регулятора тока [15].
дополнительного регулятора тока [15].
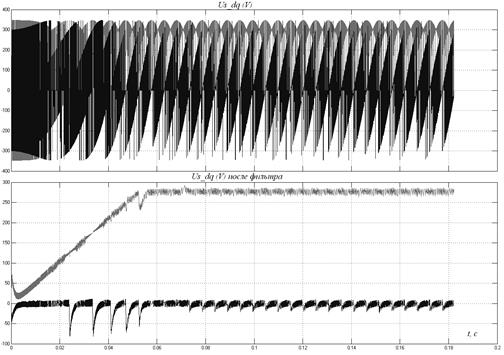
Рис. 7.6
Реактивный ток затрачивается на возбуждение машины (рис. 7.5), который быстро спадает при выходе двигателя на установившуюся скорость. Отметим еще раз, что при появлении нагрузки возникновение реактивного тока неизбежно.
На рис. 7.6 показаны также напряжения статора вентильного двигателя в координатах d,q,0.
На рис. 7.7 изображена диаграмма отработки привода с вентильным двигателем «малого» задания скорости, Uзс=0.01,В.
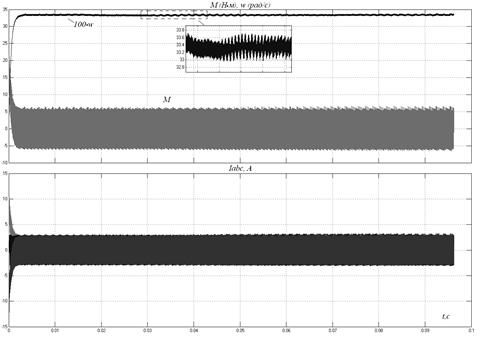
Рис. 7.7
Регулятор скорости не заходит в ограничение. Скорость ротора устанавливается без перерегулирования, ток не достигает своего максимального значения.
Наличие высших гармоник, наложенных на основные измеряемые координаты связано дискретными сигналами управления релейного регулятора тока.
8. Бездатчиковое определение скорости вентильного двигателя
В большинстве приложений, где необходимо получение хороших характеристик электропривода при минимальной его стоимости, наибольший интерес вызывают схемы бездатчикового векторного управления. Прежде всего - это атомная энергетика, в частности, перегрузочные роботы, где необходим более высокий (до 50:1) диапазон регулирования скорости и по условиям технологии исключается возможность установки датчика положения на вал ротора двигателя. К подобным системам управления (СУ) предъявляются также повышенные требования по диапазону регулирования электромагнитного момента - до 10:1.
Применительно к таким схемам термин "бездатчиковое управление" означает отсутствие датчика скорости на валу двигателя, а информация о скорости вращения и потокосцеплениях двигателя извлекается из измеренных токов и напряжений статора. Согласно [3], угловая скорость электрического поля ![]() определяется выражением:
определяется выражением:
![]() (8.0)
(8.0)
где
![]() - потокосцепления статора в неподвижной системе координат.
- потокосцепления статора в неподвижной системе координат.
![]() - число полюсов двигателя.
- число полюсов двигателя.
Структурная схема электропривода с бездатчиковым определением скорости приведена на рис. 8.1.
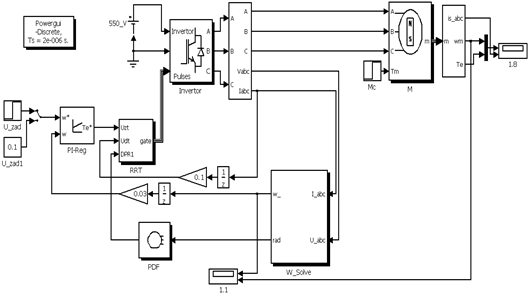
Рис. 8.1
Вычисление скорости произво?