Курсовая работа: Механізм приводу поршневого насосу
Структурний аналіз
Зображуємо структурну схему механізму.
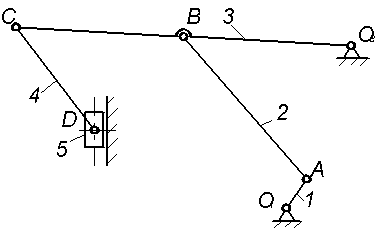
Рис. 1
Номеруємо ланки і позначаємо кінематичні пари.
Складаємо таблицю кінематичних пар.
Таблиця 1. Кінематичнi пари
| Назва КП | О | А1 | A2 | A3,B3 | С4 |
| Ланки КП | 0-1 | 1-2 | 2-3 | 3-4 | 4-5 |
| Клас КП | 5 | 5 | 5 | 5 | 5 |
| Вид руху | oб. | oб. | oб. | oб. | пост. |
Знаходимо ступінь рухомості за формулою Чебишева:
W = 3n-2p5-p4 = 3∙5-2∙7 = 1
де n – число рухомих ланок;
р5 – число кінематичних пар пятого класу;
р4 – число кінематичних пар четвертого класу.
Ділимо важільний механізм на групи Ассура.
Виділяємо структурну групу з ланок 4 – 5.
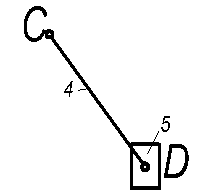
Рис.2
1) = 2; p5 = 3;
2) W = 3×2 – 2×3 = 0;
Група Асура 2 класа, 2 порядку, 2 виду.
Виділяємо структурну групу з ланок 2 – 3.
1) n = 2; p5 = 3;
2) W = 3∙2 – 2∙3 = 0;
Група Асура 2 класа, 2 порядку, 1 виду.
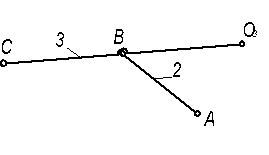
Рис. 3
Виділяємо механізм першого класу, який складається з ланок 0 – 1.
В загальному, розглянутий механізм другого класу (за класом вищої групи Асура).
1.1 Кінематичне дослідження
Задачами кінематичного дослідження є побудова планів положень механізму, траекторій окремих точок, швидкостей і прискорень ланок механізму. Дані для кінематичного розрахунку ланок механізму.
Розміри ланок важільного механізму :
LOA=0,17 м ; LАВ=1.4 м ; LСD=1,33 м, LО3C=3,2; LО3В=1,6м ;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--