Курсовая работа: Одноосьовий гіроскопічний стабілізатор
ωз = 6. Тоді Δφ = arg(w(j*6)) = -35°.
3.6 Використовуючи логарифмічні частотні характеристики, виконання
корекції САК в області середніх частот з метою отримання заданих
запасів стійкості по фазі та амплітуді
Корекцію системи проведемо при заданих якісних параметрах (час регулювання tp = 0,3с перерегулювання δ = 30%). Побудуємо ЛАХ бажаної роботи системи та корегуючого пристрою (рис. 8).
Рис. 8. ЛАХ заданої системи ( L з), бажаної ( L б) та коректую чого пристрою ( L к)
Складемо передаточні характеристики для бажаної та корегуючої систем:
wб(s) = ![]() . Враховуючи, що wб(s) = wз(s)·wк(s), отримаємо wк(s) =
. Враховуючи, що wб(s) = wз(s)·wк(s), отримаємо wк(s) = ![]() .
.
3.7 Схема корегуючого пристрою та розрахунок його елементів
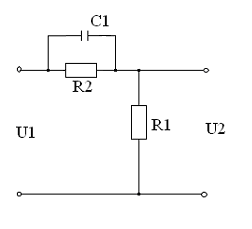
Приведемо схему корегуючого пристрою, обравши його з довідника. Згідно з наявною ЛАХ, що приведена вище, найбільше нашим вимогам задовольняють схеми №7 корегуючого пристрою (рис. 9).

а) б)
Рис. 9. Схеми корегуючого пристрою та відповідні фрагменти ЛАХ:
а) фрагмент ЛАХ, що відповідає схемі №7; б) схема №7 (К2).
Розрахуємо кожен з елементів схеми:
1) L0= ,L¥=1.
,L¥=1.
Оберемо ємність конденсатора: С1=100мкФ.
2) Т1 = ![]() Þ
Þ![]() .
.
3) T2 =  Þ
Þ![]() Þ
Þ![]() .
.
Оберемо підсилювач з таким коефіцієнтом: 20lgk=17,5, k=10(-17,5/20)=7,5 (П1).
Підберемо з ряду опорів Е24 відповідні значення опорів: R1 = 0,6 кОм, R2 = 3 кОм.
Загальна схема корегуючого пристрою має такий вигляд:

3.8 Розрахунок та побудова графіку перехідної характеристики скорегованої САК
Визначимо аналітичний вираз для перехідної характеристики замкнутої скоректованої системи за передаточною функцією розімкнутої САК при одиничному ступінчатому вхідному сигналі та побудуємо графік.
Передатна функція w(s) = ![]() .
.
Передатна функція замкненої системи:

Перехідна характеристика замкненої системи за вхідним сигналом: H(s)=G(s)*Ф(s), де G(s) = ![]() - одиничний ступінчатий вхідний сигнал.
- одиничний ступінчатий вхідний сигнал.
H(s) ![]()
Графік перехідної характеристики САК зображений на рис. 10.

Рис. 10. Перехідна характеристика САКк
3.9 Для заданого типу вхідної дії розрахунок та побудова графіку усталеної помилки скорегованої САК
Дослідимо точність замкнутої системи за передаточною функцією розімкнутої САК. При дослідженні визначимо три коефіцієнти помилок С0, С1, С2, використовуючи передаточну функцію замкнутої системи за похибкою:
Фx(s) = ![]()
Тоді
_![]()
![]()
![]()
![]()
![]()
Тобто С0 = 0, С1 = 0,1333, С2 = - 0,00844.
Побудуємо графіки помилок в усталеному режимі при: