Курсовая работа: Плавный пуск двигателя постоянного тока по системе "Широтно-импульсный преобразователь - двигатель постоянного тока"
15 пФ
4 МГц
15 пФ
15 пФ
HS
4 МГц
15 пФ
15 пФ
8 МГц
15-33 пФ
15-33 пФ
20 МГц
15-33 пФ
15-33 пФ
Внешний сброс контроллера, по контакту MCLR, при помощи внешних компонентов предназначен для разрешения работы устройства когда эксплуатационные параметры станут в норме. Если это условие не выполняется, устройство должно быть задержано в сбросе, пока эксплуатационные режимы не установятся.
Согласно руководству применения микроконтроллеров PIC для этих целей используется внешняя RC цепочка на входе контакта MCLR. Значение RC цепочки должны находится в пределах R<40 кОм, C – 0.001÷1 мкФ (согласно руководству применения PIC контроллеров.
С учетом этого принимаем: R1 => МЛТ – 0.125 22 кОм ± 10%
C5 => 0.1 мкФ
Резистор R2 ограничивает входной ток, при начальном заряде конденсатора, контакта MCLR. Значение R2 принимаем: R2 => МЛТ – 0.125 680 Ом ± 10%
Задание установок коэффициентов регулирования осуществляется построечными резисторами R1 – R3, которые выполняют роль делителей напряжения. Снимаемое напряжения с переменных движков резисторов подается на аналоговые входы контроллера RA1 – RA3. Сигнал обратной связи по току Iос подключен на вход RA0. Неиспользуемые аналоговые входы АЦП RA4 – RA5 закорочены на корпус, с целью уменьшения энергопотребления и снижения уровня наводок помех от внешних цепей на АЦП контроллера.
Неиспользуемый порт RE запрограммирован на вход линии и подключены на общий корпус, для снижения общего энергопотребления микросхемой. Ввод информации пользователем осуществляется через клавиатуру, состоящую из 4 кнопок SB1 – SB4.
Выбор контактов RB4 - RB7 (к которым подключена клавиатура) обусловлена тем, что по входам RB4 – RB7 в PIC контроллере существует встроенная опция формирования прерывания при изменении уровня на данных линиях ввода. Входные линии подтянуты к высокому уровню через резисторы R12 – R15. Значения резисторов принимаем следующие: МЛТ 0.125 10кОм ±10% с учетом этого высокий уровень является не активным, что соответствует не нажатой ни одной клавиши. В случае нажатия какой-либо кнопки SB1 – SB4 входной уровень линий RB4 – RB7 изменится на низкий, что будет причиной возникновения прерывания подпрограммы обработки клавиатуры. Дребезг контактов клавиатуры аппаратно не осуществляется, и реализуется программным способом.
Для визуального отображения информации пользователю в состав системы управления входит светодиодная матрица индикации VD6 – VD9. С учетом того, что нагрузочная способность по току линий вывода PIC контроллера должна быть не более 20 mA, выбираем светодиоды АЛ 307, с током свечения 10 mA.
Ограничительные резисторы принимаем следующего значения: МЛТ 0.125
Сигнал ШИМ формируется на контактe RC2 и подается через ограничительный резистор R4 на силовой ключ преобразователя.
Питание микросхемы осуществляется от стабилизирующего источника “+5” В и подается на ножки VDD и общий вывод VSS. Конденсатор С3 выполняет роль фильтра высокочастотных помех, и находится в непосредственной близи от ножек питания микроконтроллера.
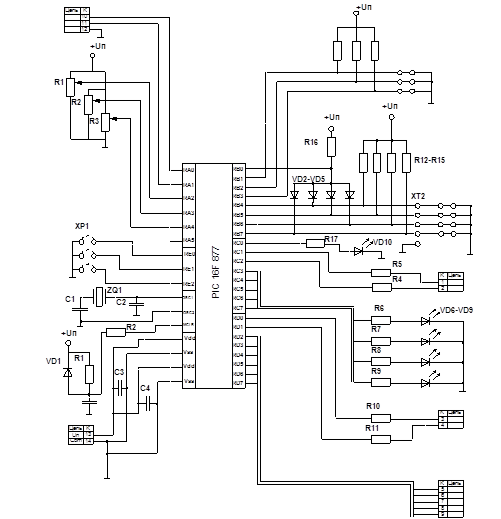
Рисунок 3.3 Система управления транзистором
3.5 Принципиальная электрическая схема драйвера управления