Курсовая работа: Повышение точности и устойчивости системы автоматического управления
- максимальная ошибка слежения ![]() при задающем воздействии, максимальная скорость и ускорение изменения которой
при задающем воздействии, максимальная скорость и ускорение изменения которой ![]() и
и ![]() ;
;
- время регулирования ![]() ;
;
- перерегулирование ![]() .
.
В связи с ужесточившимися по сравнению с пунктом 2 требованиями к качеству регулирования применением пропорционального регулятора невозможно добиться устойчивости и одновременной точности системы автоматического регулирования. Для коррекции объекта управления (2.1) в данном случае следует применить интегрирующее корректирующее устройство, имеющее передаточную функцию:
 .
.
Причем ![]() .
.
3.2 Аналитическое определение параметров регулятора
Для настройки параметров регулятора воспользуемся методикой, представленной в [2, с. 338 - 342]:
1. Дополним передаточную функцию объекта коэффициентом ![]() , удовлетворяющим требования к системе в области низких частот:
, удовлетворяющим требования к системе в области низких частот:
![]() .
.
Следовательно,
![]() .
.
2. Определим частоту, на которой ![]() .
.
Из логарифмических частотных характеристик разомкнутой системы (рисунок 3.1) видно, что система обладает запаздыванием по фазе ![]() на частоте
на частоте ![]() .
.
3. Зададим значение нуля регулятора:
![]()
4. Определим значение полюса регулятора:
5. В результате передаточная функция регулятора примет вид:
 (3.1)
(3.1)
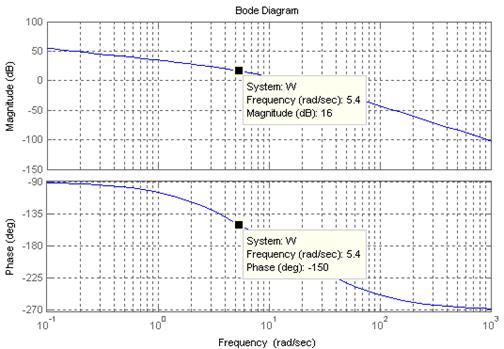
Рисунок 3.1 – Логарифмические частотные характеристики разомкнутой системы
ЛЧХ скорректированной системы (рисунок 3.2) говорят о том, что с помощью синтезированного корректирующего устройства удалось добиться приемлемых (по крайней мере близких к требуемым) показателей качества системы. Однако регулятор еще требует «подгонки».
Для построения регулятора с отставанием по фазе удобно воспользоваться следующим программным кодом:


Рисунок 3.2 – Логарифмические частотные характеристики скорректированной системы
3.3 Определение параметров регулятора с помощью среды Control System Toolbox
Более профессиональный подход к синтезу интегрирующего корректирующего устройства может быть осуществлен при помощи MATLAB Control System Toolbox. Для этого запускаем функцию sisotool(«объект управления») и создаем запретные зоны (рисунок 3.3):


Рисунок 3.3 – Запретные зоны на логарифмических частотных характеристиках объекта управления и корневом годографе
Анализ рисунка 3.3 позволяет сказать о неустойчивости замкнутой системы и наметить пути дальнейшей коррекции системы:
- необходимо добавить регулятор интегрирующего типа (полюс и ноль корректирующего устройства);
- можно уменьшить коэффициент усиления, приблизив ЛАЧХ к запретной зоне.
Изменяя величины нуля, полюса и коэффициента усиления регулятора, добиваемся требуемых показателей качества (рисунки 3.4 и 3.5). Передаточная функция регулятора (рисунок 3.6) имеет следующий вид:
![]()
Сравнение результатов (3.1) и (3.2) говорит о схожести регуляторов, и выбор его конкретной конфигурации лежит в области инженерного творчества и должен опираться на соображения целесообразности, простоты реализации и минимизации стоимости.

Рисунок 3.4 – Частотные характеристики и корневой годограф скорректированной системы управления

Рисунок 3.5 – Переходная функция скорректированной системы

Рисунок 3.6 – Частотные характеристики объекта управления, регулятора и скорректированной системы
Экспортируем ПФ регулятора в рабочую область MATLABа и определим ошибку системы при типовых воздействиях (рисунок 3.7):


а)

б)

в)