Курсовая работа: Проектирование и исследование кривошипно-ползунного механизма грохота
Храповой механизм с ведущей собачкой служит для преобразования возвратно-вращательного движения в прерывистое вращательное одного направления. Ведущее коромысло с собачкой постепенно поворачивает храповое колесо. Собачка не дает колесу вращаться в обратную сторону. Высшая пара здесь образована собачкой и храповым колесом.
Мальтийские и храповые механизмы широко применяются в станках и приборах [2].
2. Структурный анализ механизма
Механизм грохота (рисунок 1) состоит из пяти звеньев: 1 – кривошипа ОА, совершающего вращательное движение; 2 – ползуна А, совершающего возвратно-поступательное движение по кулисе; 3 – коромысла АВС, совершающего качательное движение вокруг шарнира В; 4 – шатуна СD; 5 – ползуна D, совершающего возвратно-поступательное движение; а также семи кинематических пар.
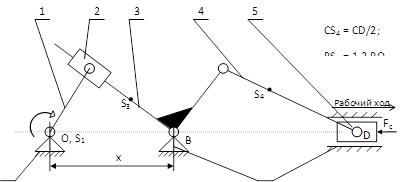
Рисунок 1 – Схема рычажного механизма
Определение степени подвижности механизма
Степень подвижности механизма определяется по формуле Чебышева:
W = 3n – 2P5 – P4 , (2.1)
Где n – число подвижных звеньев для механизма, n =5;
Р5 – число кинематических пар V класса, Р5 = 7;
Р4 – число кинематических пар IV класса, Р4 = 0.
Подставляя числовые значения, получим:
W = 3·5 – 2·7 – 0 = 1.
Следовательно, степень подвижности механизма, показывающая число ведущих звеньев в исследуемом механизме, равна 1. Это значит, что для работы механизма достаточно одного ведущего звена.
Разбивка механизма на структурные группы
Согласно классификации И. И. Артоболевского разобьем исследуемый механизм на структурные группы. Механизм грохота (рисунок 1) состоит из ведущего звена 1 и двух структурных групп II класса 2 порядка.
Обе структурные группы относятся к третьему виду: первая – (звенья 2 и 3), и вторая – (звенья 4 и 5). Структурные группы состоят из 2 звеньев и 3 кинематических пар. Формула строения механизма имеет вид:
 (2.2)
(2.2)
3. Кинематический анализ зубчатой передачи
Привод рычажного механизма грохота, состоящий из планетарного редуктора и зубчатой передачи, изображен на рисунке 2. Планетарный редуктор, состоящий из водила и четырех колес с наружным зацеплением, имеет передаточное число iН3 = 10. Зубчатые колеса, установленные после планетарного редуктора, имеют следующие числа зубьев: z4 = 12, z5 = 28.
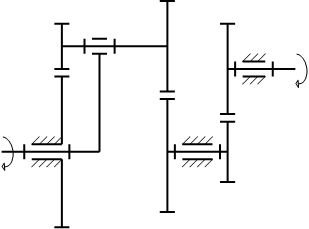
Рисунок 2 – Привод рычажного механизма
Передаточное число зубчатых колес 4 и 5 определяется по формуле
 (3.1)
(3.1)
![]()
Общее передаточное число всего привода определяется по формуле
![]() (3.2)
(3.2)
![]()