Курсовая работа: Проектирование механического привода с цилиндрическим соосным редуктором
ωFV = 0,16 . 5,6 . 1,404 . ![]() = 11,32 Н/мм;
= 11,32 Н/мм;
КFV = 1 + ![]() = 1,225.
= 1,225.
KFβ – коэффициент, учитывающий неравномерность распределения нагрузки по длине контактных линий,
KFβ = ![]() ; (4.40)
; (4.40)
где:
NF =  ; (4.41)
; (4.41)
где: h – для прямозубого зацепления:
h = ![]() ; (4.42)
; (4.42)
h = ![]() = 4,025;
= 4,025;
NF =  = 0,949;
= 0,949;
KFβ = ![]() = 1,095;
= 1,095;
KFα = Kн α = 1 – коэффициент, учитывающий распределение нагрузки между зубьями:
КF = 1,1 . 1,225 . 1,095 . 1 = 1,476;
YFS 3 , YFS 4 – коэффициенты, учитывающие форму зуба и концентрацию напряжений, определяемые для шестерни и колеса в зависимости от числа зубьев Z3 и Z4 по графику зависимости (рис. 4.2).
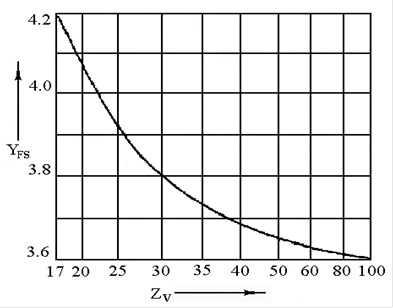
рис. 4.2
Yβ = 1 – коэффициент, учитывающий наклон зуба прямозубых передач;
Yε = 1 – коэффициент, учитывающий перекрытие зубьев:
Найдя все необходимые коэффициенты, найдём расчётное местное напряжение при изгибе для шестерни и колеса, МПа:
для шестерни:
σF 3 = ![]() = 72,78 МПа;
= 72,78 МПа;
для колеса:
σF 4 = 72,78 . ![]() = 69,51 МПа.
= 69,51 МПа.
Допускаемое напряжение, МПа:
σFP = ![]() ; (4.43)
; (4.43)
где: σFlimb – предел выносливости зубьев при изгибе, МПа:
σFlimb = ![]() ; (4.44)
; (4.44)
где: σ0 Flimb – предел выносливости зубьев при изгибе, соответствующий базовому числу циклов напряжений, МПа:
σ0 Flimb = 1,75 . НВ; (4.45)