Курсовая работа: Проектирование привода коробки скоростей металлорежущего станка
3. Стол.
4. Шпиндельная бабка с коробкой подач.
5. Коробка скоростей.
6. Станина (колонна).
7. Основание станины.
Данный станок предназначен для обработки деталей небольшой массы.
Область использования: основные производственные цеха в условиях единичного и мелкосерийного производства. Также станок используется в ремонтно-механических и инструментальных цехах.
На фундаментной плите 7 смонтирована колонна 6, в ее верхней части размещается коробка скоростей 5 с электродвигателем. На вертикальных направляющих установлена шпиндельная бабка 4 внутри которой размещается привод подач, осуществляющий вертикальное перемещение шпинделя. Поднимать и опускать шпиндель можно механически или вручную с помощью штурвала 2. Для установки и закрепления приспособлений с заготовкой имеется стол 3, его можно устанавливать на различную высоту в зависимости от размеров заготовки или приспособления.
Особенность вертикально-сверлильного станка – для обработки отверстия необходимо совместить центр будущего отверстия с осью вращения инструмента.
2. КИНЕМАТИЧЕСКИЙ РАСЧЕТ ПРИВОДА СТАНКА
2.1 Выбор диапазона регулирования и числа ступеней передач коробки скоростей
Основными техническими характеристиками вертикально-сверлильного станка, определяющими его технологические возможности являются:
- предельные значения частот вращения nmin = 18об/мин; nmax = 1000об/мин,
- знаменатель ряда частот вращения φ=1,41.
Определяем диапазон регулирования:
Определяемчисло ступеней скорости :![]()
 , принимаем z=14.
, принимаем z=14.
2.2 Разработка и построение структурных сеток и графика чисел оборотов
По заданному числу z=14 определяем возможные типы схем сложенных структур , т.к. простые множительные структуры не используем.
Для z=18 и φ=1,41 сведем основные возможные варианты в таблицу 2.1.
Исходя из принципа оптимизации, в основу которого положено минимальное число элементов привода (количество валов, шестерен, блоков и муфт) и максимального количества ступеней передач по скоростной цепи, выбираем в качестве оптимальной структуры – структуру типа А1-2, вид структурной формулы z=14=2(i0 +i΄ ·2·3).
Таблица 2.2.1 – Варианты коробок скоростей со сложенной структурой для z=18 и φ=1,41.
| Структурная формула | Вид структуры | Основные показатели привода | ||||
| Кол-во шестерен | Кол-во валов | Кол-во блоков | Кол-во передач по короткой цепи | Кол-во муфт | ||
| 2(i0 +i' ·2·3) | АⅠ | 18 | 5 | 4 | 1 | нет |
| 2(1+i·2+2·2) | БⅡ | 18 | 5 | 4 | 1 | 1 |
| 2(0+3+i"· i"·4) | БⅢ | 22 | 5 | 3 | 2 | нет |
| 2(i0 +i' · i' ·3+i" · i" ·3) | БⅠ | 26 | 7 | 4 | 2 | нет |
|
2(1+i' ·2+i'·2+i"·2) и т.д. | ВⅡ | 16 | 6 | 3 | 1 | 2 |
Общий вид типовой схемы сложенной структуры вида АⅠ- 2 приведен на рис. 2.2.1
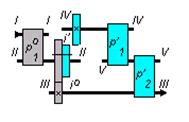
Рисунок 2.1 -Типовая схема сложенной структуры вида АⅠ- 2
В принятой структурной формуле определяем характеристики групп x1 =1, x2 =1, x3 =2, x4 =6.