Курсовая работа: Промислові роботи
F≥ ![]() M
M![]() tg(β+ρ) / bη.
tg(β+ρ) / bη.
Важільний механізм.
Для симетричних губок :
|
|
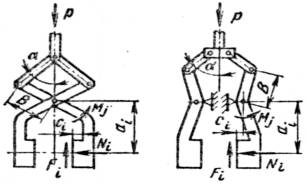
рис.5.12
F≥ 2Mj cosα / bη.
Загальний випадок :
F≥![]() 2Mj cosα / bη,
2Mj cosα / bη,
M![]() - момент захвату.
- момент захвату.
M![]() =
=![]() N
N![]() cosφ
cosφ![]() [a
[a![]() tgφ
tgφ![]() ±C
±C![]() -
-![]() (a
(a![]() - C
- C![]() tgφ
tgφ![]() )],
)],
φ![]() - кут контакту.
- кут контакту.
Рейковий механізм.
Загальний випадок:
F≥2![]() Mj /(m
Mj /(m![]() z
z![]() η)
η)
|
|

рис. 5.13
де m![]() , z
, z![]() - модуль і число зубців,
- модуль і число зубців,
η- к.к.д. η=0.94.
Вакуумні і електромагнітні ЗП.
F![]() =k
=k![]() A
A![]() (p
(p![]() -p
-p![]() ),
),
де k![]() =0.85-коефіцієнт, який враховує можливість зміни атмосферного тиску і властивість ущільнення ;
=0.85-коефіцієнт, який враховує можливість зміни атмосферного тиску і властивість ущільнення ;
A![]() - ефективна площа дії ЗП; p
- ефективна площа дії ЗП; p![]() - атмосферний тиск; p
- атмосферний тиск; p![]() - залишковий тиск в камері присосів ; F
- залишковий тиск в камері присосів ; F![]() - сила ЗП.
- сила ЗП.
Рекомендації p![]() - p
- p![]() = 0.03…0.035МПа.
= 0.03…0.035МПа.
A![]() =(0.6…0.7)А
=(0.6…0.7)А![]() ,
,
А![]() - площа поверхні контакту.
- площа поверхні контакту.
Електромагнітні ЗП.
Сила притягання електромагніта :![]()
F![]() =(I·n)
=(I·n)![]() /(25A(R
/(25A(R![]() +R
+R![]() )
)![]() ),
),
де I·n-число ампер-витків обмотки; A-площа поверхні контакту вантажу з полюсами електромагніта; R![]() , R
, R![]() - магнітний опір на ділянках шляху магнітного потоку відповідно повітряному і металічному.
- магнітний опір на ділянках шляху магнітного потоку відповідно повітряному і металічному.
5.3.3 Формули для розрахунку контактних напружень при захваті заготовки (деталі) губками ЗП