Курсовая работа: Промислові роботи
Характерні представники конструктивних груп :
1. Напольні ПР.
2. Підвісні ПР тельферного типу .
3. ПР мостового типу .
4. Спеціальні ПР: а) крокуючі; б) підводні; в) космічні.
5. ПР агрегатно-модульного типу .
Проектування нових моделей на базі уніфікованих агрегатних вузлів і блоків (модулів) забезпечує створення широкого діапазону конструкцій ПР з технічними параметрами, які відповідають вимогам конкретного споживача (виробника). Переваги методу А-М побудови: скорочення часу і трудомісткості проектування і можливість виготовлення ПР. При побудові конструкцій ПР застосовуються принципи уніфікації і нормалізації як при розробці механічної системи так і системи управління . Класифікуються агрегатно-модульні конструкції ПР по таким признакам: компоновці, по можливості зміни технічних характеристик ПР, по застосуванню систем керування.
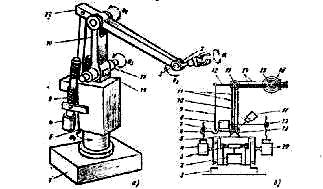
рис. 4.2
Компоновка (а) та кінематична схема (б) промислового робота “Asca 1 Rb-6”:
1-основа; 2,4,17,20-електродвигуни з друкованим якорем та вбудованим редуктором; 3-хвильова передача; 6,18-кулькові гвинтові пари; 5-поворотний корпус; 7-тяга; 8-зрівноважуючий вантаж; 9,10,12-ланки руки; 11-14-тяги; 13,15,19-кривошипи; 16-конічна передача.
рис.4.3
5. Захватні пристрої
5.1 Класифікація захватних пристроїв
Захватні пристрої (ЗП) маніпуляторів служать для захвату і утримання в певному (конкретному) положенні об'єктів маніпулювання. Ці об'єкти можуть мати різні розміри, форму, масу і характеризуватися різними фізичними властивостями.
Прикладами ЗП являються: монтажні інструменти (тиски, ключі і ін.)
До ЗП ставляться певні вимоги: загального характеру і спеціальні, зв'язані з конкретними умовами праці.
До числа обов'язкових вимог відносяться : надійність захвату і утримання об'єкту, стабільність базування, недопустимість пошкоджень або руйнування об'єктів, міцність деталей ЗП.
Спеціальні вимоги : можливість захвату і базування деталей в широкому діапазоні (маси, розмірів і форми), легкість і бистрота заміни елементів ЗП, необхідність автоматичної зміни зусиль утримання об'єкта в залежності від його маси.
В теперішній час ведуться розробки конструкцій ЗП, які можуть захвачувати і базувати неорієнтовано розміщені об'єкти.
Класифікація ЗП ведеться по ряду признаків:
1. По способу захвату і утримання об'єкта маніпулювання - механічні, пневматичні (вакуумні), електромагнітні і комбіновані.
2. По виду управління (керування) - некеровані, командні, жостко-програмні, адаптивні (чуттєві).
3. По характеру базування: спроможні (здатні) до перебазування - можуть захвачувати і утримувати об'єкти з широким діапазоном геометричних і фізичних параметрів; центруючі - пристосовані до захвату і утримання об'єктів за обмежену номенклатуру поверхонь, які відрізняються формою і розмірами; базуючі - спеціалізовані, приспособлені до захвату і утримання групи об'єктів, які мають однорідні конструктивно-технологічні параметри; фіксуючі - спеціальні - забезпечують захват і утримання одного виду об'єктів маніпулювання.
4. По числу робочих позицій: однопозиційні, багатопозиційні.
5. По характеру кріплення: незмінні, змінні, швидкозмінні, автоматизовані.
6. По робочому діапазону - широкодіапазонні - можуть удержувати об'єкти в широкому діапазоні розмірів поверхонь захвату ; вузькодіапазонні - можуть удержувати об'єкти в обмеженому діапазоні розмірів поверхонь захвату.
5.2 Будова захватних пристроїв і принцип дії. Механічні ЗП некеровані