Курсовая работа: Промислові роботи
2. Визначення сил привода.
3. Перевірка відсутності пошкоджень поверхні деталі при захваті.
4. Розрахунок на міцність деталей ЗП.
По першому випадку розрізняють такі схеми утримання об'єктів в механічних ЗП :
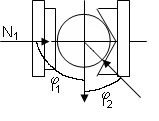
1. Деталь підтримується губкою елемента ЗП, сили тертя мало впливають на механізм утримання деталі.

рис.. 5.8
N![]() =R
=R![]() [sinφ
[sinφ![]() -μcosφ
-μcosφ![]() ]/[sin(φ
]/[sin(φ![]() + φ
+ φ![]() )-2μcos(φ
)-2μcos(φ![]() +φ
+φ![]() )],
)],
де i, j = 1,2, i ≠ j ;
μ - коефіцієнт тертя губки захвату з деталлю,
негартована сталь μ = 0.12 … 0.15 - Сталь 45, 50;
гартованна сталь μ = 0.3 … 0.35 - сталі 65Г У10А
2.
 |
?????? ??????????? ??????? ?????????? ???? ?????.
φ![]() = 90˚,
= 90˚,
φ![]() = φ.
= φ.
R![]() N
N![]()
N![]() =R
=R![]() (sinφ-μcosφ)/(cosφ+2 μsinφ),
(sinφ-μcosφ)/(cosφ+2 μsinφ),
N![]() =R
=R![]() /(cosφ+2μsinφ).
/(cosφ+2μsinφ).
3. Деталь утримується силами тертя.
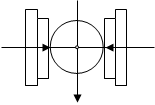 |
N![]() = N
= N![]() = R
= R![]() /2μ.
/2μ.
На практиці часто зустрічаються складне навантаження ЗП, при якому має місце комбінація описаних випадків.
5.3.2 Розрахунок зусиль привода
Розглянемо на прикладах клинових, важільних і рейкових передаточних механізмів.
Клиновий механізм.
Для симетричних губок : F≥ 2Mtg(β+ρ) / bη,
|
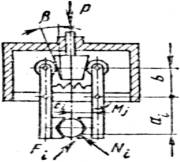 β= 4…8°, ρ= 1°…3° ;
β= 4…8°, ρ= 1°…3° ;
ρ- кут тертя ;
β- кут конуса.
рис.5.11