Курсовая работа: Промислові роботи
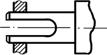
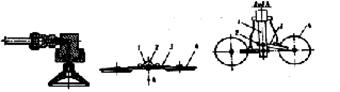
пружній валик цанга тиски


|
|
|
рис.5.1
Розжим робочих елементів таких ЗП проходить при контакті з заготовкою, внаслідок чого можуть бути пошкоджені поверхні деталей або зажимних елементів (недолік). Ці ЗП застосовують в умовах масового виробництва при маніпулюванні з об'єктами невеликих мас і габаритів.
Непривідні ЗП із стопорними механізмами забезпечують чергування циклів зажиму і розжиму деталей, не потребують спеціальних команд від системи керування і додаткової енергії. Деталі утримуються силою пружин внаслідок ефекту самозатягування. Як правило, робота таких ЗП можлива тільки при їх вертикальному положенні.
Командні ЗП . Широко розповсюджені конструкції тискового типу (обценьки). Рух губок забезпечується пневмо-, гідро-, або електроприводом.
ЗП з важільними передаточним механізмом і пневмо-гідро приводом.
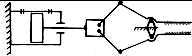
рис.5.2
Центруючі ЗП з рейковим передаточним механізмом.
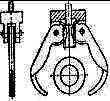
рис.5.3
ЗП з розширяючими еластичними камерами.
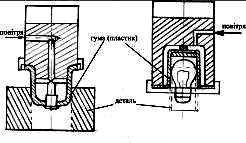
рис.5.4
Застосування таких пристроїв обумовлено кригкістю матерії і складною конфігурацією поверхонь багатьох деталей.
Вакуумні , з згинаючими еластичними камерами і електромагнітні ЗП.
пневмоприсоскаелементи кріплення вакуумного з кульовою опороюзахватного пристрою
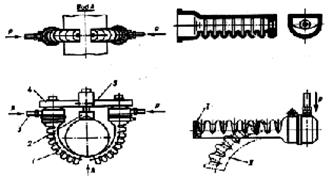
Захватний пристрій із згинаючими еластичними камерами для захвату виробів за зовнішню поверхню: за внутрішню поверхню:
1-еластичні камери; 2-базуючаІ, ІІ-форми, які приймає камера в призма; 3-патрубки; 4-корпус; залежності від тиску стиснутого 5-різьбовий держакповітря
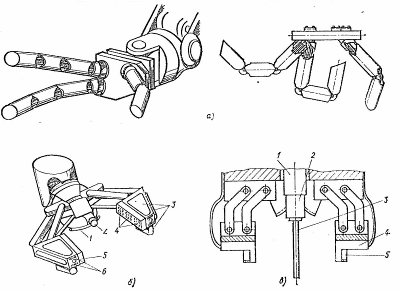
рис.5.7
Адаптивні захватні пристрої:
а-трьохпалі з активним тросовим механізмом привода ланок; б-адаптивний; в-з тактильним щупом;
5.3 Розрахунок захватних пристроїв
5.3.1 Задачі розрахунку
Механічні ЗП. Розрахунок включає: