Курсовая работа: Промислові роботи
4. Автооператор для установки і знімання деталей при обслуговуванні металорізальних верстатів .
4. Конструкції промислових роботів.
4.1 Конструктивна схема ПР
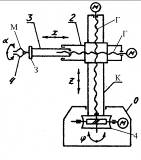
рис. 4.1.
М![]() … М
… М![]() - електродвигуни ;М
- електродвигуни ;М![]() - пневмопривід ;
- пневмопривід ;
Механізми :Черв'ячна передача – Ч; Передача гвинт-гайка – Г; Зубчасті механізми – З; Основа механічної системи – О;Корпус – К; Маніпулятор – М; Система керування – У.
4.2 Технічні характеристики ПР
1. Модель . 7. Спосіб програмування .
2. Вантажопідйомність . 8. Помилка позиціювання .
3. Число степеней рухомості .9. Лінійні і кутові переміщення .
4. Число рук (захватних пристроїв).10. Швидкість переміщення .
5. Привід . 11. Габаритні розміри .
6. Тип системи керування . 12. Маса.
4.3 Системи координат

прямокутна плоскапрямокутна просторова
(Декартова) (Декартова)


циліндричнасферична
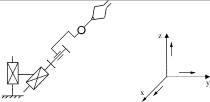
4.4 Приклади структурних кінематичних схем ПР
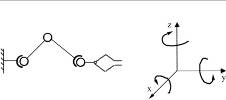
1. Прямокутна плоска система координат:
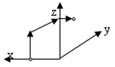
2. Прямокутна просторова (Декартова):
3. Полярна циліндрична :
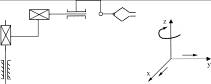
4. Полярна сферична :