Курсовая работа: Промислові роботи

рис. 2.3
3. Типи маніпуляторів
3.1 Структурні і кінематичні схеми маніпуляторів
Механічна система ПР умовно може бути розділена на чотири структурних елементи: 1-основа (нерухома ланка); 2-корпус (портал); 3-механічна рука;
4-захватний пристрій.
Механічна система ПР Кінематична схема маніпулятора
|

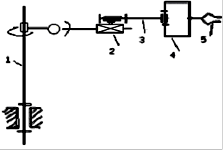
рис.3.1 рис.3.2
Механічна рука і захватний пристрій складають маніпулятор.
Переважне застосування в маніпуляторах одержали кінематичні ланцюги з поступальними і обертовими парами ; сферичні шарніри складні у виконанні і утрудняють (заважають) передачу рухів від приводів, тому застосовуються рідко.
Схеми маніпуляторів

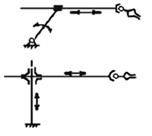
рис.3.3
На рис.3.3 показані схеми маніпуляторів для одержання рухів в базовій площині
З допомогою маніпуляторів розв'язують ряд задач в різних областях науки і техніки (робота в небезпечних і шкідливих для людини зонах; трудоємкі і монотонні роботи: зварка, фарбування, зборка та інші).
3.2 Класифікація маніпуляторів
Класифікуються маніпулятори за такими признаками:
1. По характеру виконуючих робіт:
а)універсальні;
б)спеціальні.
2. По способу керування:
а)з ручним (копіруючі);
б)з автоматичним управлінням (по програмі ЕОМ).
Універсальні М. застосовуються для виконання підйомно-транспортних робіт в машинобудуванні, а також для механізації операцій по обслуговуванні технологічного обладнання (установки і знімання деталей на металорізальних верстатах, зварочні і свердлильні операції).
Спеціальні М. застосовуються:
- в ковальсько-пресових цехах;
- в ливарному виробництві.