Курсовая работа: Расчет линейной непрерывной двухконтурной САУ по заданным требованиям к качеству ее работы
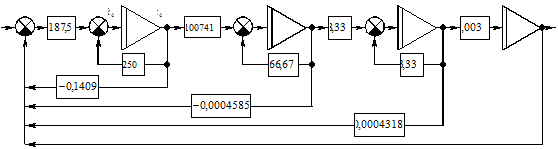
Рисунок 3.2 — Структурная схема скорректированной обратными связями САУ
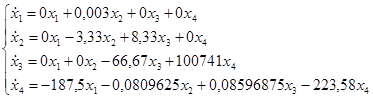
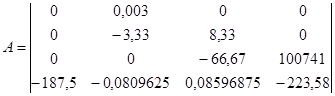
На основании структурной схемы САУ в пространстве состояний (рис. 3.2) запишем матрицы коэффициентов, входных сигналов на интеграторы и выходных сигналов с интеграторов:
![]()
![]()
 ,
,  ,
, ![]() .
.
Используя программу Stvarfdbk.exe, получим следующие данные:
— коэффициенты знаменателя: ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
— корни: ![]() ;
; ![]() ;
; ![]() ;
;
— коэффициенты числителя: ![]() .
.
Передаточная функция скорректированной системы имеет вид:
![]() .
.
3.2.2Оценка качества скорректированной САУ
С помощью программы Perehod.exe, куда вводим полученную выше передаточную функцию, определяем время переходного процесса и перерегулирование:
![]() ,
, ![]() .
.
Погрешность по времени переходного процесса будет равна:
![]() .
.
Погрешность по перерегулированию:
![]() .
.
График переходного процесса представлен на рисунке 3.3.
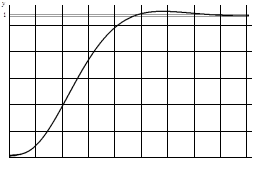
Рисунок 3.3 — Переходной процесс в скорректированной системе
3.3 Определение индекса наблюдаемости САУ
Для определения индекса наблюдаемости системы используется программа Observ.exe. Индекс наблюдаемости используется в программе Luen.exe для определения порядка необходимого корректирующего фильтра.
Индексом наблюдаемости системы называется такое минимальное целое число ![]() , при котором матрица
, при котором матрица ![]() , определяемая выражением
, определяемая выражением ![]() , имеет ранг равный
, имеет ранг равный ![]() . В общем случае
. В общем случае ![]() . Если ранг
. Если ранг ![]() равен
равен ![]() , в то время как ранг
, в то время как ранг ![]() меньше
меньше ![]() , то индекс наблюдаемости
, то индекс наблюдаемости ![]() равен
равен ![]() . Если ранг
. Если ранг ![]() меньше
меньше ![]() , то система считается ненаблюдаемой.
, то система считается ненаблюдаемой.
Для расчета индекса наблюдаемости ![]() необходимо ввести порядок матрицы
необходимо ввести порядок матрицы ![]() и матрицы
и матрицы ![]() . Так как по условию наблюдаемыми состояниями являются
. Так как по условию наблюдаемыми состояниями являются ![]() ,
, ![]() и
и ![]() , то матрица
, то матрица ![]() будет иметь вид:
будет иметь вид:
 . (3.1)
. (3.1)
Использовав программу Observ.exe, получим значение индекса наблюдаемости ![]() . Порядок наблюдателя Люенбергера определяется из соотношения:
. Порядок наблюдателя Люенбергера определяется из соотношения:
![]() . (3.2)
. (3.2)
Таким образом, в системе будет использоваться наблюдатель Люенбергера первого порядка, то есть наблюдатель будет состоять из одного интегратора.
3.4 Проектирование САУ с заданными свойствами с использованием наблюдателя Люенбергера
3.4.1Построение структурной схемы САУ с наблюдателем Люенбергера