Курсовая работа: Расчет напряжений деформаций в изотропном теле по заданному тензору напряжений
Решая эту систему уравнений в той же последовательности, как и в п. 3.2.1, получим:
![]() .
.
Здесь по-прежнему знак у ![]() принят положительным, а знаки остальных направляющих косинусов определились решением подсистемы из первых двух уравнений (21).
принят положительным, а знаки остальных направляющих косинусов определились решением подсистемы из первых двух уравнений (21).
Углы, которые составляет вторая главная ось с исходными осями координат, пока вычислять не будем. Может оказаться, что определитель матрицы направляющих косинусов будет равен -1 , что соответствует левой системе координат. Для тог, чтобы получить правую систему координат, нужно будет у одной из осей поменять знаки направляющих косинусов.
1.3.2 Вычисление 
Подставляя в (14) и (15) ![]() и используя те же уравнения, получим:
и используя те же уравнения, получим:
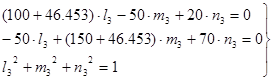 (22)
(22)
Решая эту систему, получим:
![]() .
.
Соответствующие углы равны:
![]() .
.
1.4 Проверка правильности вычисления главных напряжений и положения главных осей тензора напряжений
Проверка правильности вычисления главных напряжений
Для проверки правильности вычисленных главных напряжений определим инварианты тензора напряжений:
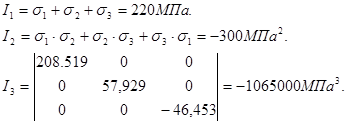
Как видим, инварианты получились такими же, как и в выражениях (1). Этот результат также подтверждает вывод о том, что напряженное состояние в точке нагруженного тела является инвариантным объектом.
Проверка правильности вычисления положения главных осей тензора напряжений
Проверка правильности вычисления положения главных осей тензора напряжений основана на свойствах матрицы направляющих косинусов (13). Она относится к ортогональным матрицам и обладает следующими свойствами:
1. Определитель ортогональной матрицы равен единице.
2. Сумма квадратов элементов, входящих в каждую строку (столбец) равна единице.
3. Если рассматривать каждую строку матрицы как вектор-строку, а каждый столбец – как вектор-столбец, то скалярные произведения двух разных векторов-строк (векторов-столбцов) равны нулю.
Воспользуемся первым свойством ортогональных матриц.
Подставив в (13) вычисленные направляющие косинусы, получим;
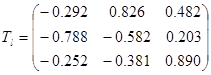 . (23)
. (23)
Определитель этой матрицы равен единице:
 .
.
Так как определитель получился равным 1 , то система координат – правая. Поэтому знаки направляющих косинусов остаются без изменения.
![]() .
.
Соответствующие углы будут равны: